





























4
Edit
4-24
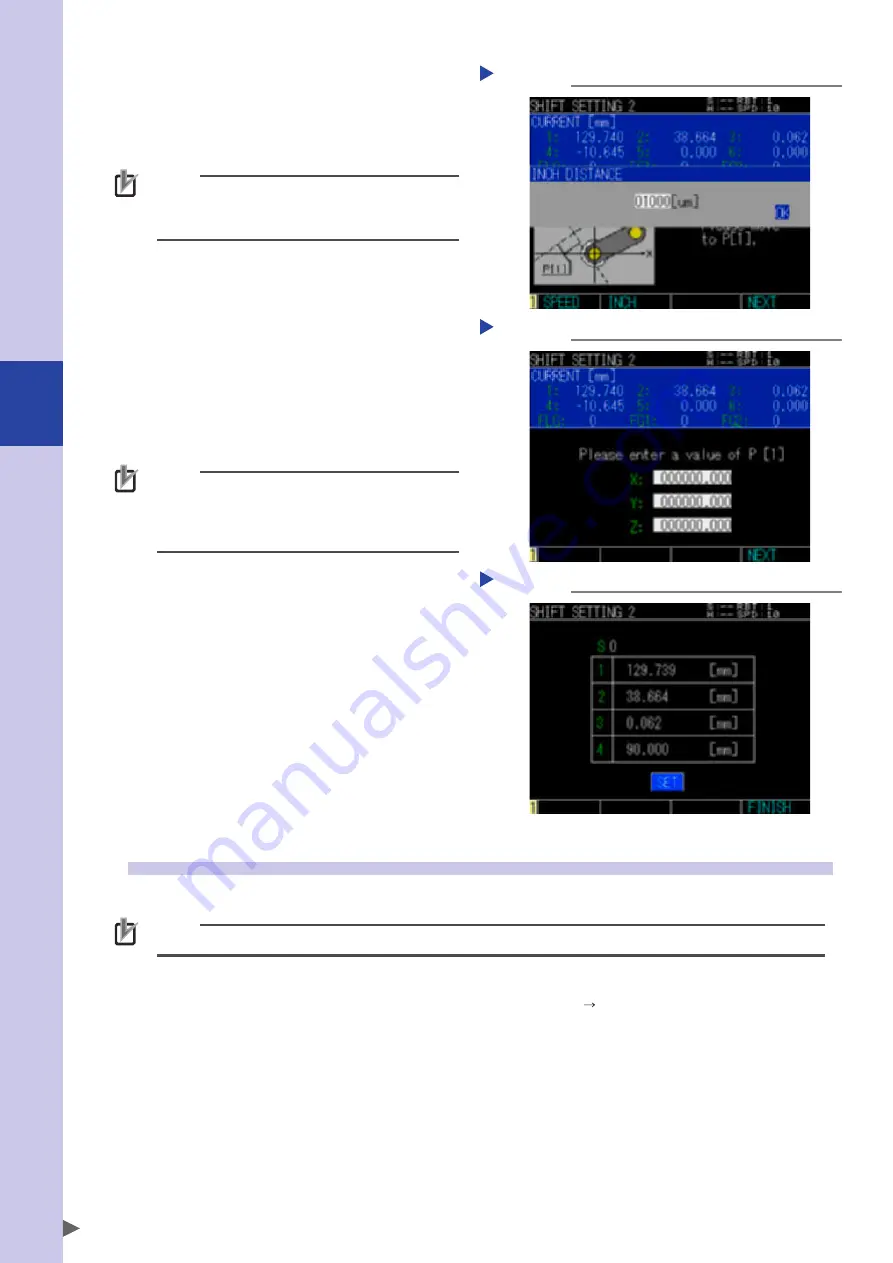
Step 3
Determine the point P [1].
Move the robot tip to the Point P [1] with
the jog key, press the F4 key (NEXT) to decide
the position.
Inputting the inch distance
Step 3
NOTE
Determine the points to teach accurately,
otherwise the shift coordinates cannot be set
correctly.
Step 4
Input the point P [1].
Input the point data of X, Y, and Z with 0 to 9,
"+", "-", and "." keys, then press the F4 key
(NEXT).
Inputting point P [1] value
Step 4
Step 5
Determine point P [2].
Determine the point P [2] according to
the same procedure as the point P [1].
NOTE
The shift value of the Z-direction will be defined by
the Z-axis coordinate value of point 1.
On the other hand, that of point 2 will not be
reflected to the shift coordinates.
Step 6
Set the shift coordinate.
Checking the setting
Step 6
Check the shift coordinate to be displayed.
Select “SET” and press the ENTER key to save
the settings. Press the F4 key (FINISH) to finish
setting.
When pressing the F4 key (FINISH) or ESC key
in the status that the settings are not saved,
the setting is completed without saving.
If the calculation cannot be performed,
a corresponded alarm occurs.
3.5 Selecting shift coordinates
When using the shift coordinates, select the shit coordinates that have been created.
NOTE
The shift coordinates cannot be used only when creating or editing them. Be sure to select the shift coordinates.
Step 1
Select [SELECT].
Press the F6 key (SELECT) on the "SHFT COORDINATE" screen (Edit Shift Coordinate) to open the shift
number selection pop-up screen.
Summary of Contents for YRCX Series
Page 1: ...7 6HULHV DW 1R 1 5 5RERW RQWUROOHU 23 5 7 21 0 18 6 5 5RERWV 5 6HULHV...
Page 2: ......
Page 10: ......
Page 12: ......
Page 14: ......
Page 20: ......
Page 28: ......
Page 164: ......
Page 166: ......
Page 178: ......
Page 186: ......
Page 264: ......
Page 265: ......
Page 266: ...DW 1R 1 XWKRUL HG LVWULEXWRU 3ULQWHG LQ XURSH...
































































