





























4
Edit
4-71
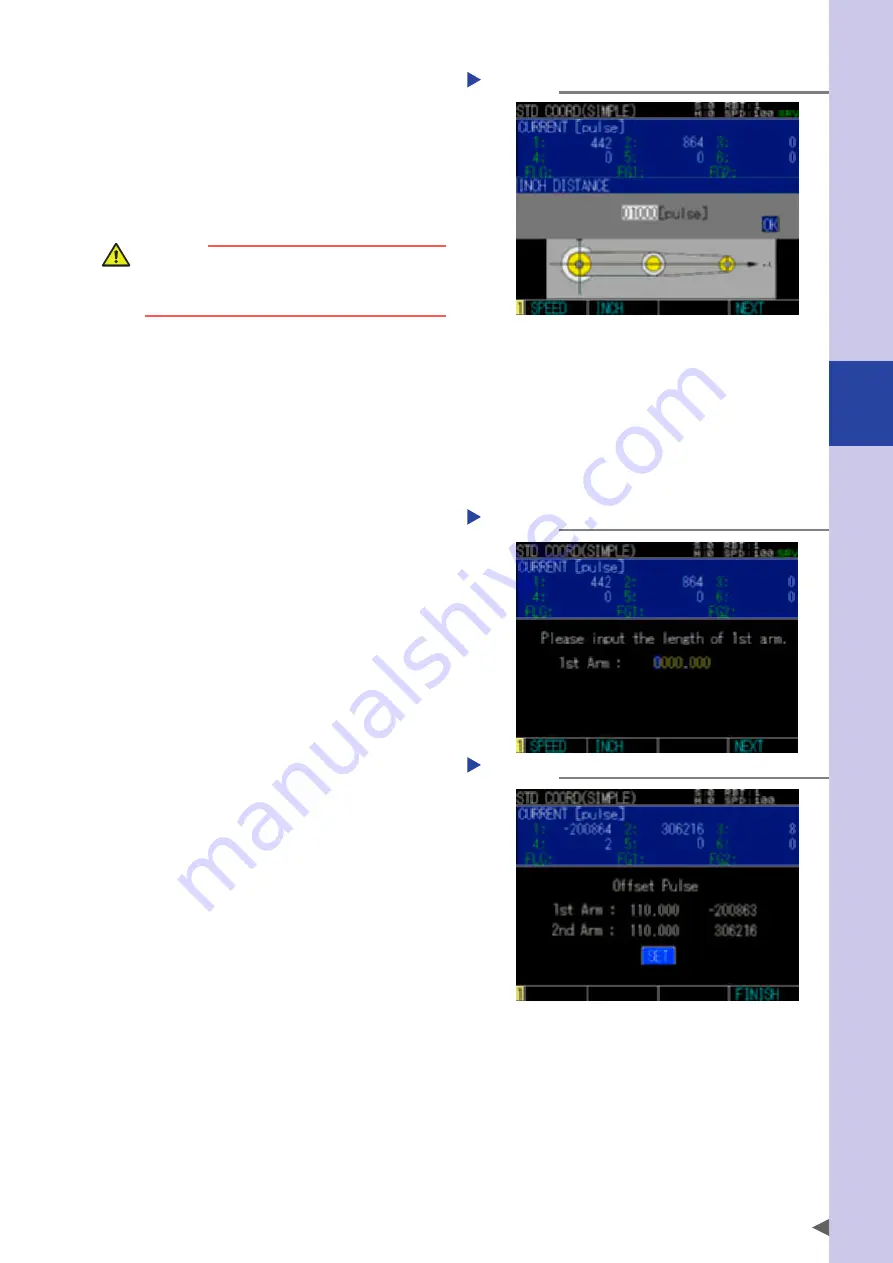
Step 2
Align the first arm and second arm
on the line.
Setting the inch amount
Step 2
Move the first arm and second arm using
the Jog key operation or Jog operation in
the servo off status to the position where
they are aligned, and then press the F4 key
(NEXT). At this time, the direction shown in
the figure above becomes the +X direction.
WARNING
When performing the operation with the Jog key,
the robot is in operation. Therefore, do not enter
the robot movement range to prevent any hazard.
During the operation with the Jog key, the operation can be performed by adjusting the speed and inch
distance.
To adjust the speed, select the F1 key (SPEED) to display the speed setting pop-up screen. Adjust the
speed on this screen.
For details about speed adjustment, refer to "2.3 Changing the Jog movement speed" in Chapter 3.
To adjust the inch amount, select the F2 key (INCH) to display the inch amount adjustment pop-up
screen. Use 0 to 9 keys to input the pulse value.
* The first arm and second arm of the robot described in this manual are equivalent to the X-arm and
Y-arm of the YRC controller.
Step 3
Input the arm lengths.
Inputting the first arm and
second arm lengths
Step 3
Use 0 to 9 keys to input the first arm length,
and then press the F4 (NEXT).
Next, input the second arm length, and then
press the F4 key (NEXT).
Step 4
Set the standard coordinates.
Check the arm length and offset pulse value.
Select [SET], and then press the ENTER key to
save the settings. After the settings have been
saved, press the F4 key (FINISH) or ESC key to
exit the setting.
When pressing the F4 key (FINISH) or ESC key
in the status that the settings are not saved,
the setting is completed without saving.
If the calculation cannot be performed,
corresponding alarms occur.
Checking the settings
Step 4
Summary of Contents for YRCX Series
Page 1: ...7 6HULHV DW 1R 1 5 5RERW RQWUROOHU 23 5 7 21 0 18 6 5 5RERWV 5 6HULHV...
Page 2: ......
Page 10: ......
Page 12: ......
Page 14: ......
Page 20: ......
Page 28: ......
Page 164: ......
Page 166: ......
Page 178: ......
Page 186: ......
Page 264: ......
Page 265: ......
Page 266: ...DW 1R 1 XWKRUL HG LVWULEXWRU 3ULQWHG LQ XURSH...



































































