





























Consider the presence of the force sensor when the workpiece is aligned by using the fingers
of the gripper or when the workpiece is picked sideways since the gravity can affect the force
measurement.
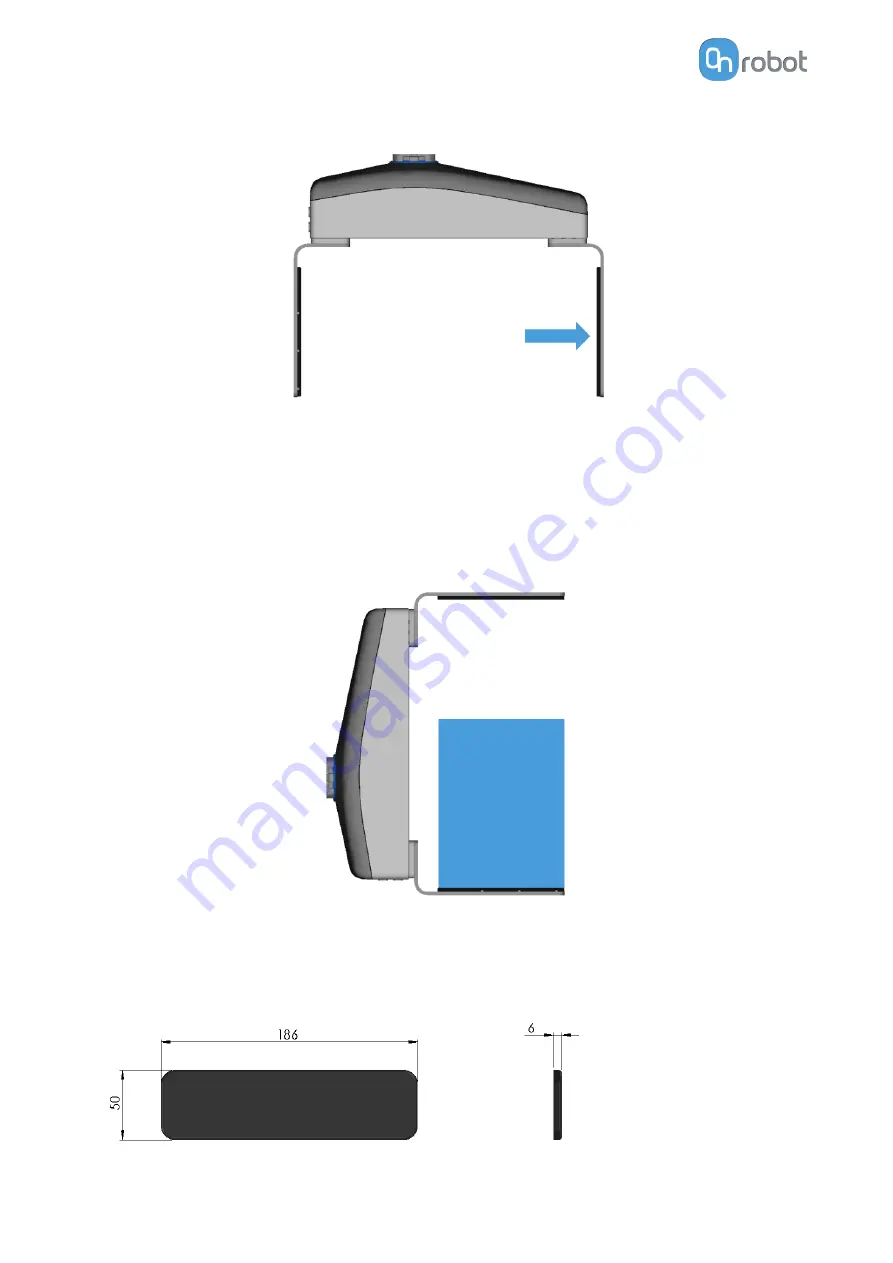
If the workpiece is picked sideways, make sure to orient the gripper with the moving finger on
top, as shown in the image below. Also ensure that the bottom finger makes contact with the
workpiece before the top finger.
Finger pads
Four finger pads are provided with the gripper and can be mounted in different configurations
to achieve the best grip for your workpiece.
HARDWARE SPECIFICATION
60
Summary of Contents for 2FGP20
Page 1: ...USER MANUAL FOR UR ROBOTS v1 13 0 Original Instructions...
Page 62: ...Illustration Pad position Maximum force N 2 200 3 100 4 400 HARDWARE SPECIFICATION 62...
Page 71: ...8 2 3 Tools 8 2 3 1 2FGP20 All dimensions are in mm and inches HARDWARE SPECIFICATION 71...
Page 79: ...12 Certifications CERTIFICATIONS 79...
Page 80: ...12 1 EMC 12 2 2FGP20 Environment CERTIFICATIONS 80...
Page 81: ...12 3 Declaration of Incorporation 12 3 1 2FGP20 CERTIFICATIONS 81...




























































