





























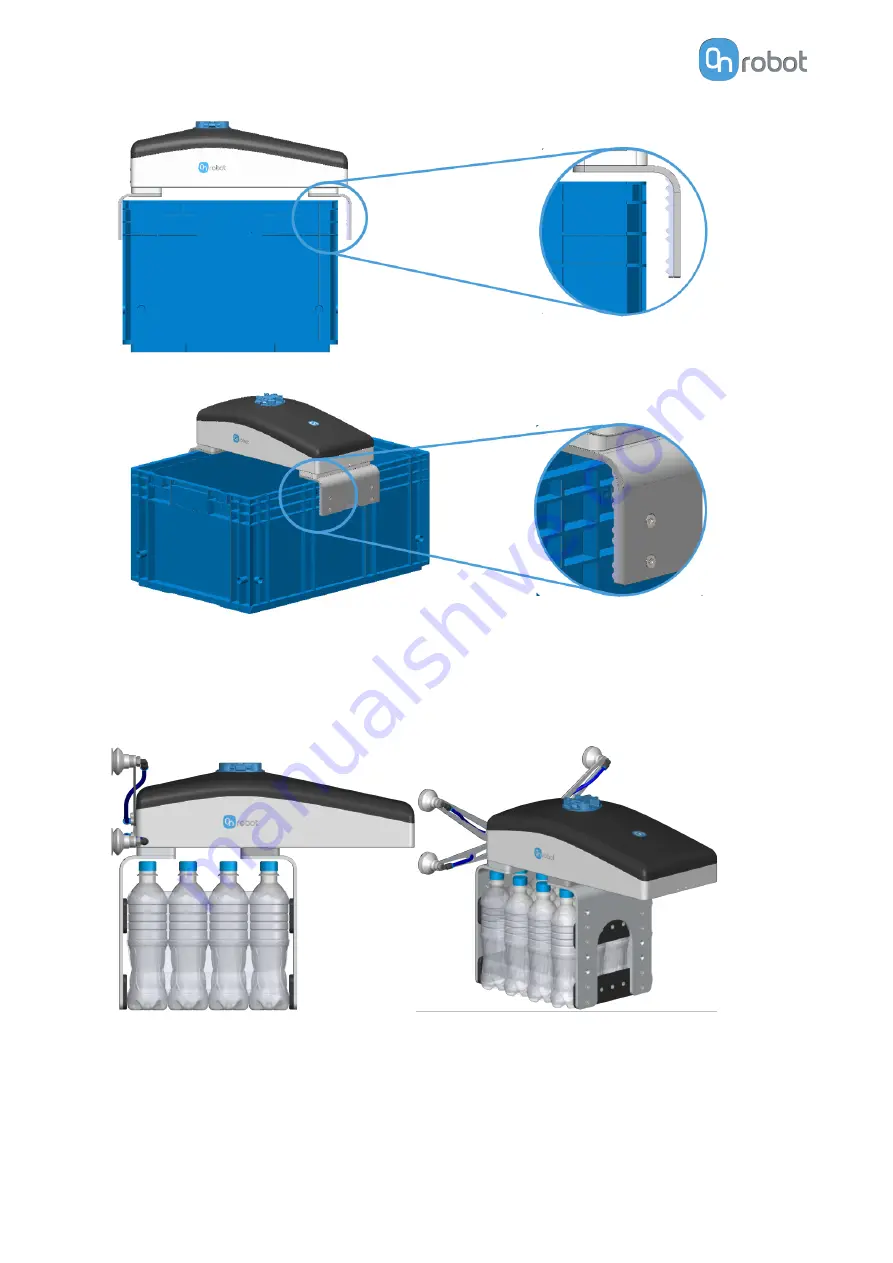
Another example is shown in the image below for picking wrapped foil bottles. For this
workpiece type, it is recommended to mount the pads horizontally to have as many contact
points as possible. By doing so, the applied force can be increased and a firmer grip is
achieved. Place the pads as close to the bottom of the workpiece as possible, so the
workpiece structure is stronger and can resist more force.
If custom fingers are required, they can be made to fit the gripper according to the
dimensions (mm) [inch] shown below. Use M6x10mm screws to attach the fingers.
HARDWARE SPECIFICATION
64
Summary of Contents for 2FGP20
Page 1: ...USER MANUAL FOR UR ROBOTS v1 13 0 Original Instructions...
Page 62: ...Illustration Pad position Maximum force N 2 200 3 100 4 400 HARDWARE SPECIFICATION 62...
Page 71: ...8 2 3 Tools 8 2 3 1 2FGP20 All dimensions are in mm and inches HARDWARE SPECIFICATION 71...
Page 79: ...12 Certifications CERTIFICATIONS 79...
Page 80: ...12 1 EMC 12 2 2FGP20 Environment CERTIFICATIONS 80...
Page 81: ...12 3 Declaration of Incorporation 12 3 1 2FGP20 CERTIFICATIONS 81...



































































