





























Additional Software Options
100
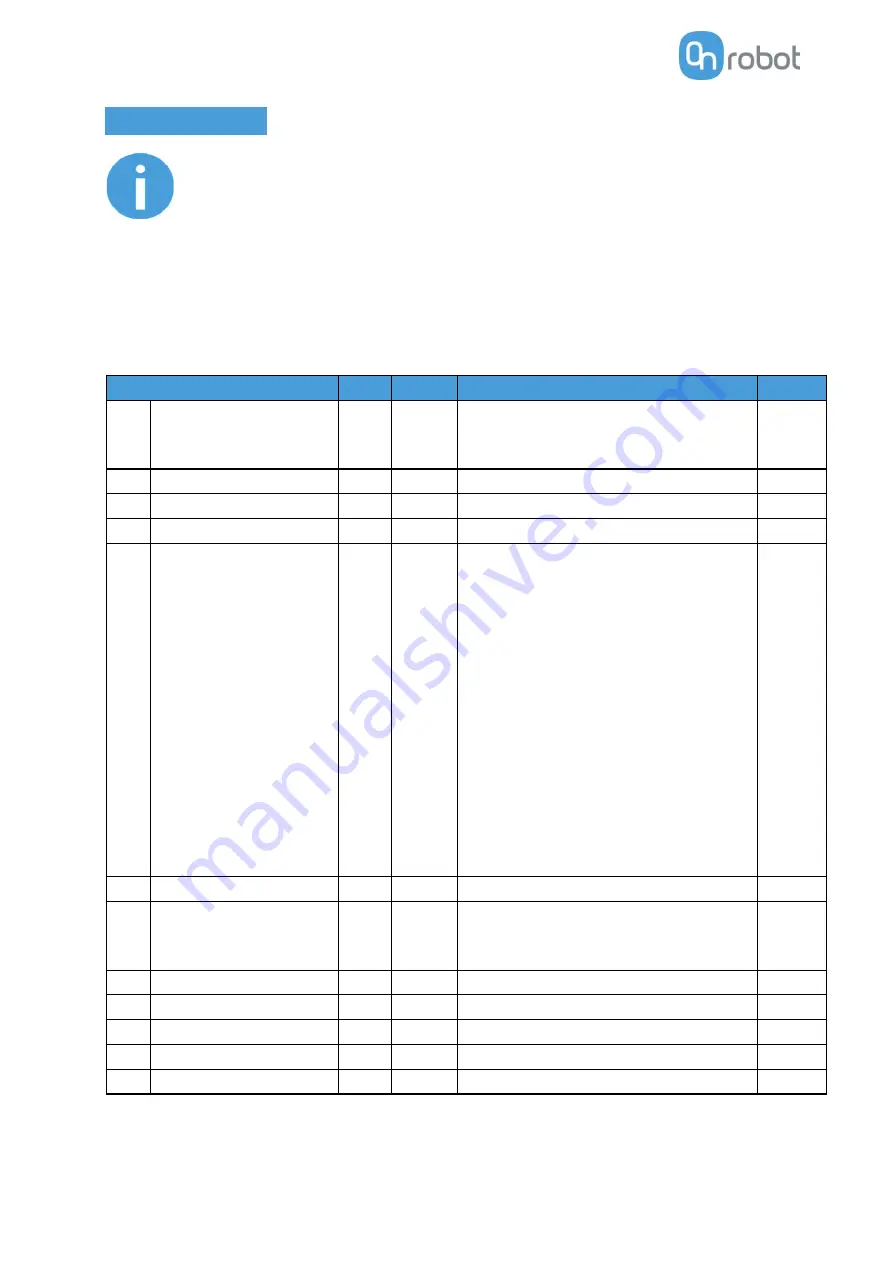
RG2/6
NOTE:
This assembly instance can be used for both single and dual gripper
configuration. Not only dual RG2 or dual RG6 but mixed configuration is
also possible (RG2+RG6 or RG6+RG2). When used in single gripper
configuration always use the
Primary (Prim.)
values.
T->O assembly id: 104
T->O data size: 32 bytes
T->O parameters:
Parameter name
Bytes Type
Comments
Start bit
Prim. RG Device connected
2
UINT 16
0: Disconnected
32: RG2 is connected
33: RG6 is connected
1
Prim. RG Actual Depth
2
INT 16
1/10 mm
17
Prim. RG Actual Relative Depth 2
INT 16
1/10 mm
33
Prim. RG Actual Width
2
INT 16
1/10 mm (with fingertip offset)
49
Prim. RG Status
2
UINT 16
0b______1: 1 when in motion, 0 when not.
The gripper will only accept new
commands when 0.
0b_____1_: Internal- or external grip is
detected.
0b____1__: Safety switch 1 is pushed.
0b___1___: Safety circuit 1 is activated.
The gripper will not move while this flag is
high; can only be reset by power cycling
the gripper.
0b__1____: Safety switch 2 is pushed.
0b_1_____: Safety circuit 2 is activated.
The gripper will not move while this flag is
high; can only be reset by power cycling
the gripper.
0b1______: General safety error. Possible
cause: the gripper is booted with some
safety switch pressed or hardware error.
65
Reserved
6
81
Sec. RG Device connected
2
UINT 16
0: Disconnected
32: RG2 is connected
33: RG6 is connected
129
Sec. RG Actual Depth
2
INT 16
1/10 mm
145
Sec. RG Actual Relative Depth 2
INT 16
1/10 mm
161
Sec. RG Actual Width
2
INT 16
1/10 mm (with fingertip offset)
177
Sec. RG Status
2
UINT 16 Same as above
193
Reserved
6
209
Summary of Contents for Gecko Gripper
Page 1: ...USER MANUAL FOR NACHI ROBOTS ORIGINAL INSTRUCTION EN v1 05...
Page 12: ...Operationmode s 12 Mode I OnRobot EtherNet IP...
Page 26: ...Installation 26...
Page 47: ...Operation 47...
Page 48: ...Operation 48 Mode II OnRobot WebLogic...
Page 64: ...Installation 64...
Page 115: ...Additional Software Options 115 O Tassemblyid 157 O Tdata size 64 bytes O Tparameters...
Page 123: ...Additional Software Options 123...
Page 139: ...Hardware Specification 139 RG2 GrippingSpeedGraph RG2 Work Range...
Page 142: ...Hardware Specification 142 RG6 GrippingSpeedGraph RG6 Work Range...
Page 162: ...Hardware Specification 162 9 2 Mechanical Drawings 9 2 1 Adapter plate s...
Page 163: ...Hardware Specification 163 Adapter I...
Page 164: ...Hardware Specification 164 Adapter J...
Page 170: ...Hardware Specification 170 Gecko All dimensionsare in mm and inches...
Page 171: ...Hardware Specification 171 RG2 FT All dimensionsare in mm and inches...
Page 172: ...Hardware Specification 172 RG2 All dimensionsare in mm and inches...
Page 173: ...Hardware Specification 173 RG6 All dimensionsare in mm and inches...
Page 174: ...Hardware Specification 174 VG10 All dimensionsare in mm and inches...
Page 175: ...Hardware Specification 175 All dimensionsare in mm and inches...
Page 176: ...Hardware Specification 176 VGC10 All dimensionsare in mm and inches...
Page 177: ...Hardware Specification 177 All dimensionsare in mm and inches...
Page 178: ...Hardware Specification 178 Quick Changer Tool side All dimensionsare in mm and inches...
Page 185: ...Certifications 185 12 Certifications...
Page 186: ...Certifications 186...
Page 187: ...Certifications 187...
Page 188: ...Certifications 188...
Page 189: ...Certifications 189...
Page 190: ...Certifications 190...






































































