





























Hardware Specification
149
Vacuum
Vacuum is defined as the percentage of absolute vacuum achieved relative to atmospheric pressure, i.e.:
The vacuum in kPa setting is the target vacuum. The pump will run at full speed until the target vacuum
is achieved, and then run at a lower speed necessary to maintain the target vacuum.
The pressure in the atmosphere varies with weather, temperature and altitude. The VG g rippers
automatically compensate for altitudes up to 2km, where the pressure is about 80% of sea level.
Air flow
Air flow is the amount of air that must be pumped to maintain the target vacuum. A completely tight
system will not have any air flow, whereas real life applications have some smaller air leakages from two
different sources:
•
Leaking vacuum cup lips
•
Leaking workpieces
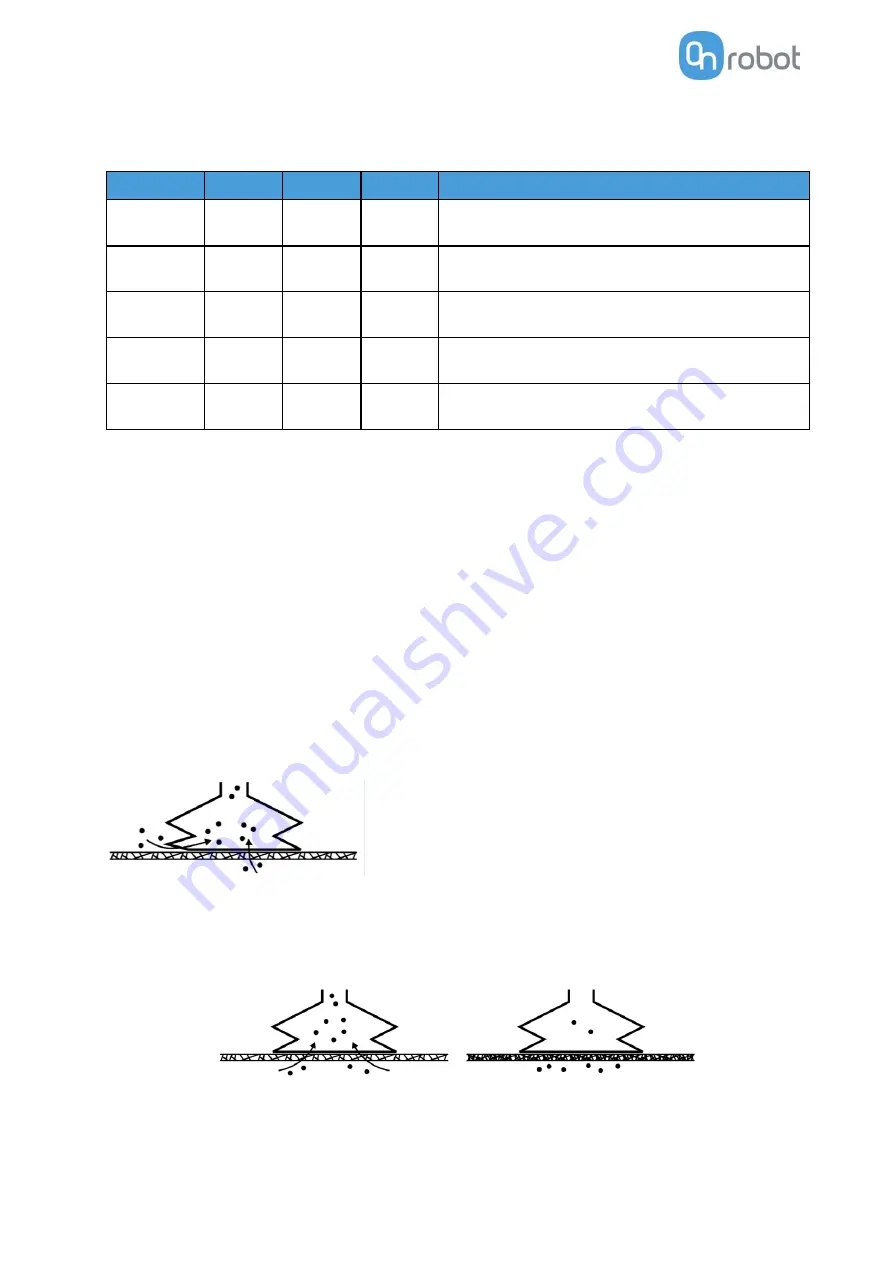
The smallest leak under a vacuum cup can be hard to find (see picture below).
Leaking workpieces can be even harder to identify. Things that look completely tight might not be tight at
all. A typical example is coarse cardboard boxes. The thin outer layer is often requiring a lot of air flow to
create a pressure difference over it (see figure below).
Therefore, the users must be aware of the following:
•
VG grippers are not suitable for most uncoated, coarse cardboard boxes.
% vacuum
Bar
kPa
inHg
Typically used for
0%
0.00rel.
1.01 abs.
0.00rel.
101.3 abs.
0.0rel.
29.9 abs.
No vacuum / No lifting capacity
20%
0.20rel.
0.81 abs.
20.3rel.
81.1 abs.
6.0rel.
23.9 abs.
Cardboard and thin plastics
40%
0.41rel.
0.61 abs.
40.5rel.
60.8 abs.
12.0rel.
18.0 abs.
Light workpieces and long suction cup life span
60%
0.61rel.
0.41 abs.
60.8rel.
40.5 abs.
18.0rel.
12.0 abs.
Heavy workpieces and strongly secured grips
80%
0.81rel.
0.20 abs.
81.1rel.
20.3 abs
23.9rel.
6.0 abs.
Max. vacuum. Not recommended
Summary of Contents for Gecko Gripper
Page 1: ...USER MANUAL FOR NACHI ROBOTS ORIGINAL INSTRUCTION EN v1 05...
Page 12: ...Operationmode s 12 Mode I OnRobot EtherNet IP...
Page 26: ...Installation 26...
Page 47: ...Operation 47...
Page 48: ...Operation 48 Mode II OnRobot WebLogic...
Page 64: ...Installation 64...
Page 115: ...Additional Software Options 115 O Tassemblyid 157 O Tdata size 64 bytes O Tparameters...
Page 123: ...Additional Software Options 123...
Page 139: ...Hardware Specification 139 RG2 GrippingSpeedGraph RG2 Work Range...
Page 142: ...Hardware Specification 142 RG6 GrippingSpeedGraph RG6 Work Range...
Page 162: ...Hardware Specification 162 9 2 Mechanical Drawings 9 2 1 Adapter plate s...
Page 163: ...Hardware Specification 163 Adapter I...
Page 164: ...Hardware Specification 164 Adapter J...
Page 170: ...Hardware Specification 170 Gecko All dimensionsare in mm and inches...
Page 171: ...Hardware Specification 171 RG2 FT All dimensionsare in mm and inches...
Page 172: ...Hardware Specification 172 RG2 All dimensionsare in mm and inches...
Page 173: ...Hardware Specification 173 RG6 All dimensionsare in mm and inches...
Page 174: ...Hardware Specification 174 VG10 All dimensionsare in mm and inches...
Page 175: ...Hardware Specification 175 All dimensionsare in mm and inches...
Page 176: ...Hardware Specification 176 VGC10 All dimensionsare in mm and inches...
Page 177: ...Hardware Specification 177 All dimensionsare in mm and inches...
Page 178: ...Hardware Specification 178 Quick Changer Tool side All dimensionsare in mm and inches...
Page 185: ...Certifications 185 12 Certifications...
Page 186: ...Certifications 186...
Page 187: ...Certifications 187...
Page 188: ...Certifications 188...
Page 189: ...Certifications 189...
Page 190: ...Certifications 190...


































































