





























Hardware Specification
150
•
Extra attention must be paid to leakages, e.g. vacuum cup shape and surface roughness
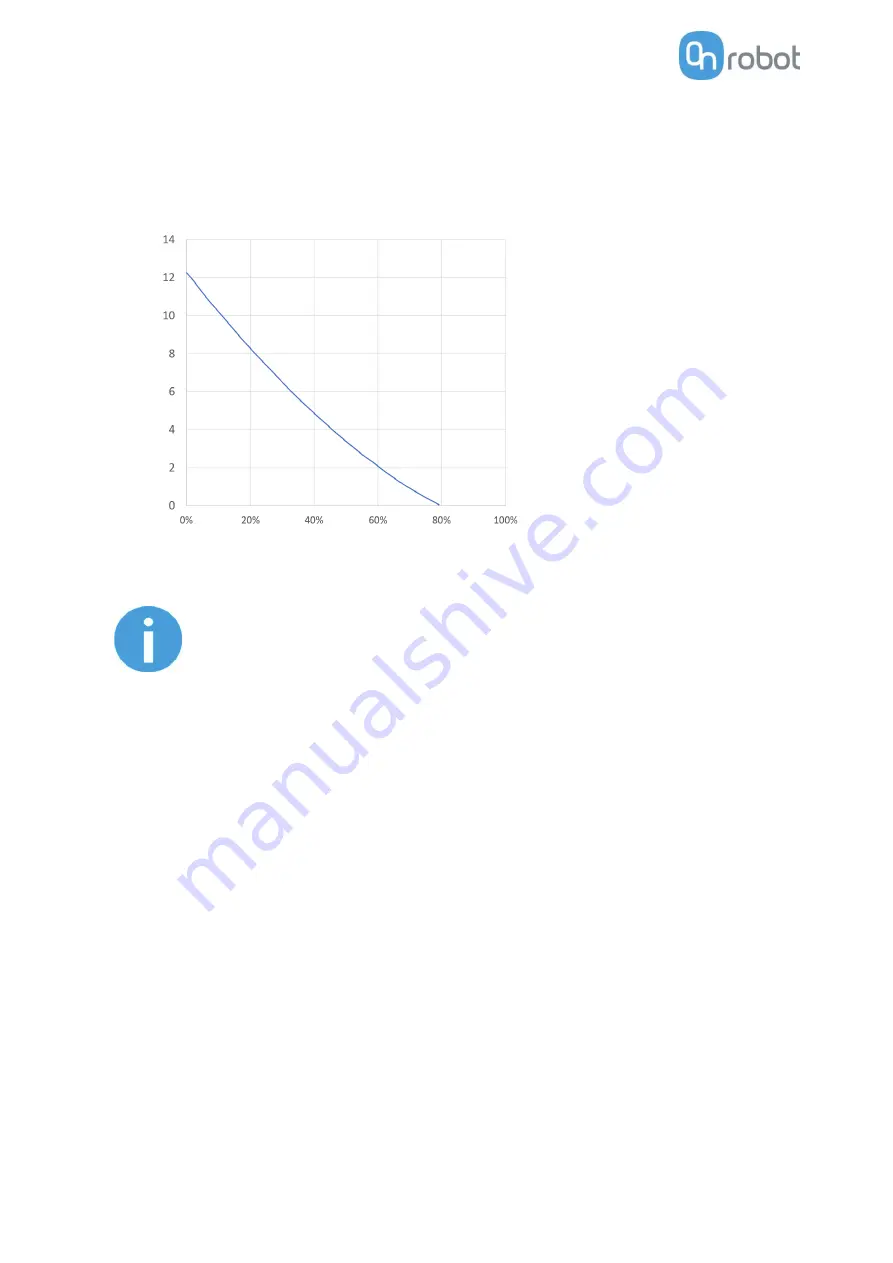
The air flow capability of a VG grippers is shown in the graph below:
NOTE:
The easiest way to check if a cardboard box is sufficiently tight is simply
to test it using the VG grippers.
A high vacuum percentage setting does not give a higher lifting
capacity on corrugated cardboard. In fact, a lower setting is
recommended, e.g. 20%.
A low vacuum setting results in less air flow and less friction below the
vacuum cups. This means VG gripper filters and vacuum cups will last
longer.
VG pump, air flow performance
N
l/
m
in
.
Vacuum percentage
Summary of Contents for Gecko Gripper
Page 1: ...USER MANUAL FOR NACHI ROBOTS ORIGINAL INSTRUCTION EN v1 05...
Page 12: ...Operationmode s 12 Mode I OnRobot EtherNet IP...
Page 26: ...Installation 26...
Page 47: ...Operation 47...
Page 48: ...Operation 48 Mode II OnRobot WebLogic...
Page 64: ...Installation 64...
Page 115: ...Additional Software Options 115 O Tassemblyid 157 O Tdata size 64 bytes O Tparameters...
Page 123: ...Additional Software Options 123...
Page 139: ...Hardware Specification 139 RG2 GrippingSpeedGraph RG2 Work Range...
Page 142: ...Hardware Specification 142 RG6 GrippingSpeedGraph RG6 Work Range...
Page 162: ...Hardware Specification 162 9 2 Mechanical Drawings 9 2 1 Adapter plate s...
Page 163: ...Hardware Specification 163 Adapter I...
Page 164: ...Hardware Specification 164 Adapter J...
Page 170: ...Hardware Specification 170 Gecko All dimensionsare in mm and inches...
Page 171: ...Hardware Specification 171 RG2 FT All dimensionsare in mm and inches...
Page 172: ...Hardware Specification 172 RG2 All dimensionsare in mm and inches...
Page 173: ...Hardware Specification 173 RG6 All dimensionsare in mm and inches...
Page 174: ...Hardware Specification 174 VG10 All dimensionsare in mm and inches...
Page 175: ...Hardware Specification 175 All dimensionsare in mm and inches...
Page 176: ...Hardware Specification 176 VGC10 All dimensionsare in mm and inches...
Page 177: ...Hardware Specification 177 All dimensionsare in mm and inches...
Page 178: ...Hardware Specification 178 Quick Changer Tool side All dimensionsare in mm and inches...
Page 185: ...Certifications 185 12 Certifications...
Page 186: ...Certifications 186...
Page 187: ...Certifications 187...
Page 188: ...Certifications 188...
Page 189: ...Certifications 189...
Page 190: ...Certifications 190...






























































