





























Operation
72
NOTE:
To make a program run automatically when the Compute Box is powered
on just leave the program running while you power the Compute Box off.
To start a new program, click on the
New
button.
•
To add a new row, click on the
Add new conditions and commands
.
•
To delete a row, click on the
icon.
•
To move the row up or down click on the
icons.
NOTE:
Conditions and commands are executed from the top to the bottom.
Same commands at the bottom can override the ones at the top.
•
To duplicate a row click on the
icon.
•
To disable a row (not to be executed) uncheck the checkbox
next to the row number.
The rows must have at least one condition and at least one command to be executed.
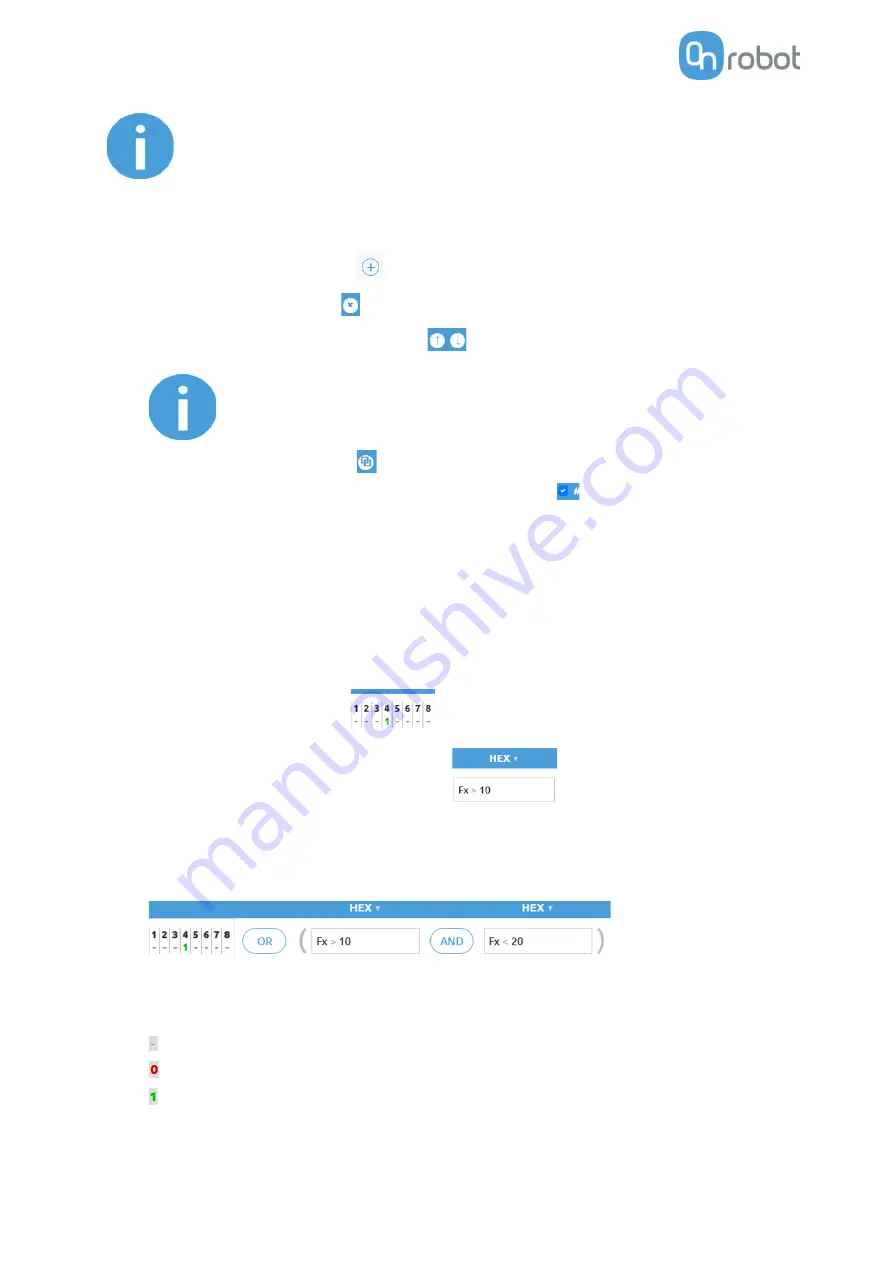
Conditions
Conditions are the input fields marked by blue.
There are two types of conditions:
•
Digital Input type - like DI4=1
•
Device specific value type - like HEX Fx > 10N
These types of conditions can be combined with AND or OR logic to form a more complex condition:
If
( DI4=1 )
OR
(HEX Fx > 10 N
AND
HEX Fx < 20N )
Condition is true if Fx is between 10N and 20N or robot has signaled high in Digital Input 4.
Digital inputs (DI1-DI8) can have the following three states: (click to cycle through the states)
•
-
Don’t care (this bit is masked and will give true result for the bit)
•
- give logic true if Input bit is low
•
-give logic true if Input bit is high
Summary of Contents for Gecko Gripper
Page 1: ...USER MANUAL FOR NACHI ROBOTS ORIGINAL INSTRUCTION EN v1 05...
Page 12: ...Operationmode s 12 Mode I OnRobot EtherNet IP...
Page 26: ...Installation 26...
Page 47: ...Operation 47...
Page 48: ...Operation 48 Mode II OnRobot WebLogic...
Page 64: ...Installation 64...
Page 115: ...Additional Software Options 115 O Tassemblyid 157 O Tdata size 64 bytes O Tparameters...
Page 123: ...Additional Software Options 123...
Page 139: ...Hardware Specification 139 RG2 GrippingSpeedGraph RG2 Work Range...
Page 142: ...Hardware Specification 142 RG6 GrippingSpeedGraph RG6 Work Range...
Page 162: ...Hardware Specification 162 9 2 Mechanical Drawings 9 2 1 Adapter plate s...
Page 163: ...Hardware Specification 163 Adapter I...
Page 164: ...Hardware Specification 164 Adapter J...
Page 170: ...Hardware Specification 170 Gecko All dimensionsare in mm and inches...
Page 171: ...Hardware Specification 171 RG2 FT All dimensionsare in mm and inches...
Page 172: ...Hardware Specification 172 RG2 All dimensionsare in mm and inches...
Page 173: ...Hardware Specification 173 RG6 All dimensionsare in mm and inches...
Page 174: ...Hardware Specification 174 VG10 All dimensionsare in mm and inches...
Page 175: ...Hardware Specification 175 All dimensionsare in mm and inches...
Page 176: ...Hardware Specification 176 VGC10 All dimensionsare in mm and inches...
Page 177: ...Hardware Specification 177 All dimensionsare in mm and inches...
Page 178: ...Hardware Specification 178 Quick Changer Tool side All dimensionsare in mm and inches...
Page 185: ...Certifications 185 12 Certifications...
Page 186: ...Certifications 186...
Page 187: ...Certifications 187...
Page 188: ...Certifications 188...
Page 189: ...Certifications 189...
Page 190: ...Certifications 190...







































































