





























Operation
45
VG10 / VGC10
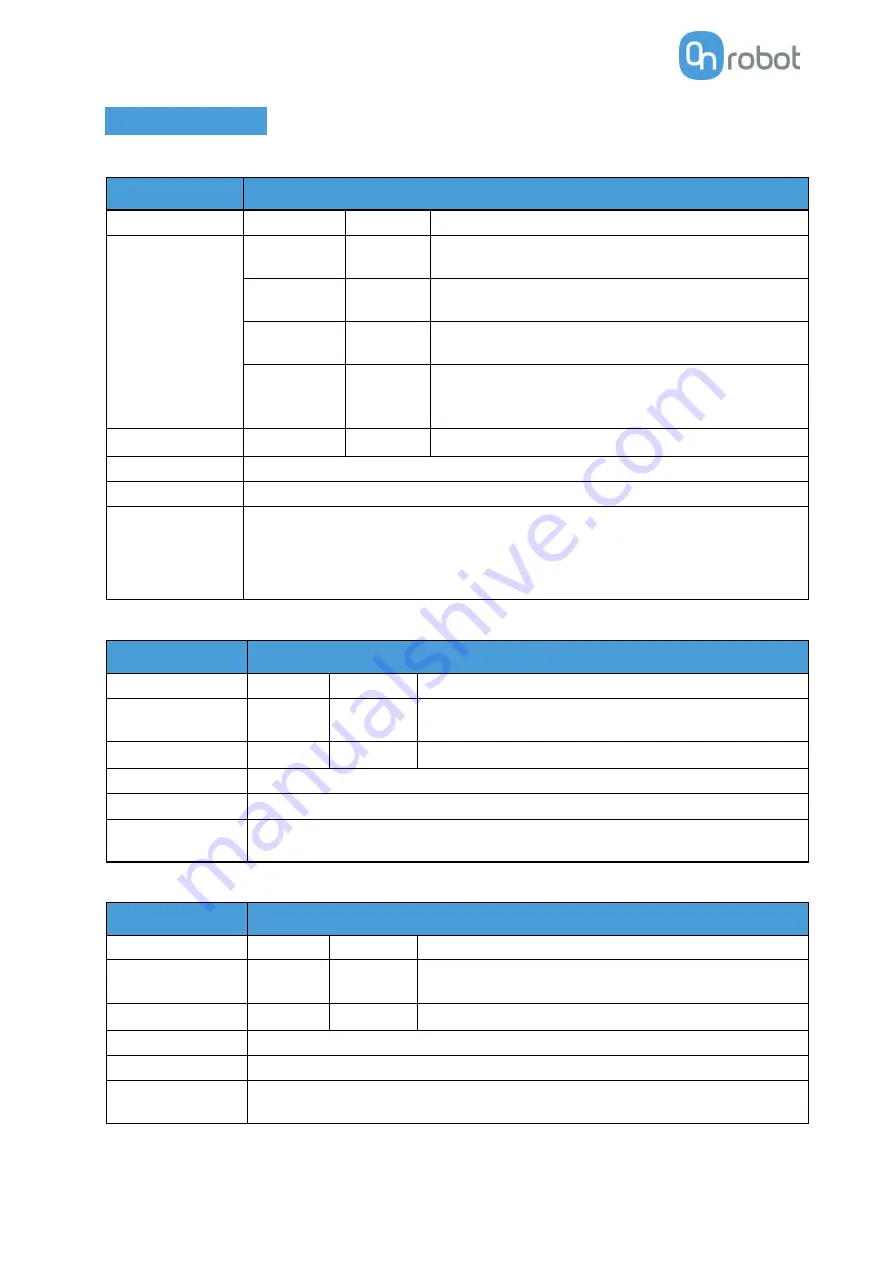
Function name:
OR_VG10_grip(instance, chA_vacuum, chB_vacuum, wait)
Name
Type
Description
Input:
instance
integer
1: single or primary - in dual configuration
2: secondary in dual configuration
chA_vacuum
integer
Required vacuum level for channel A in %, set 0 to
release
chB_vacuum
integer
Required vacuum level for channel B in %, set 0 to
release
wait
integer
Wait until the vacuum reach the required level
0: don’t wait for
vacuum
1: wait until the vacuum reach the required level
Output:
-
-
-
Description:
Set the required vacuum for channels or release the part gripped.
Example:
instance = 1
vacuumA = 20
vacuumB = 20
waitFor = 1
CallProc OR_VG10_grip(instance, vacuumA, vacuumB, waitFor)
Function name:
OR_VG10_getVacA(instance)
Name
Type
Description
Input:
instance
integer
1: single or primary - in dual configuration
2: secondary in dual configuration
Output:
-
Integer
Vacuum level of A channel in %
Description:
Get actual vacuum level of A channel.
Example:
instance = 1
CallProc vacuum_A = OR_VG10_getVacA(instance)
Function name:
OR_VG10_getVacB(instance)
Name
Type
Description
Input:
instance
integer
1: single or primary - in dual configuration
2: secondary in dual configuration
Output:
-
Integer
Vacuum level of B channel in %
Description:
Get actual vacuum level of B channel.
Example:
instance = 1
CallProc vacuum_B = OR_VG10_getVacB(instance)
Summary of Contents for Gecko Gripper
Page 1: ...USER MANUAL FOR NACHI ROBOTS ORIGINAL INSTRUCTION EN v1 05...
Page 12: ...Operationmode s 12 Mode I OnRobot EtherNet IP...
Page 26: ...Installation 26...
Page 47: ...Operation 47...
Page 48: ...Operation 48 Mode II OnRobot WebLogic...
Page 64: ...Installation 64...
Page 115: ...Additional Software Options 115 O Tassemblyid 157 O Tdata size 64 bytes O Tparameters...
Page 123: ...Additional Software Options 123...
Page 139: ...Hardware Specification 139 RG2 GrippingSpeedGraph RG2 Work Range...
Page 142: ...Hardware Specification 142 RG6 GrippingSpeedGraph RG6 Work Range...
Page 162: ...Hardware Specification 162 9 2 Mechanical Drawings 9 2 1 Adapter plate s...
Page 163: ...Hardware Specification 163 Adapter I...
Page 164: ...Hardware Specification 164 Adapter J...
Page 170: ...Hardware Specification 170 Gecko All dimensionsare in mm and inches...
Page 171: ...Hardware Specification 171 RG2 FT All dimensionsare in mm and inches...
Page 172: ...Hardware Specification 172 RG2 All dimensionsare in mm and inches...
Page 173: ...Hardware Specification 173 RG6 All dimensionsare in mm and inches...
Page 174: ...Hardware Specification 174 VG10 All dimensionsare in mm and inches...
Page 175: ...Hardware Specification 175 All dimensionsare in mm and inches...
Page 176: ...Hardware Specification 176 VGC10 All dimensionsare in mm and inches...
Page 177: ...Hardware Specification 177 All dimensionsare in mm and inches...
Page 178: ...Hardware Specification 178 Quick Changer Tool side All dimensionsare in mm and inches...
Page 185: ...Certifications 185 12 Certifications...
Page 186: ...Certifications 186...
Page 187: ...Certifications 187...
Page 188: ...Certifications 188...
Page 189: ...Certifications 189...
Page 190: ...Certifications 190...


































































