























4 Types and functions of operations
−
37
−
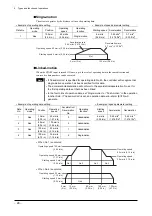
4.13 Softlimit (controller mode only)
This function is available when the “Softlimit” parameter explained in “Common parameters” is set to ON.
When the command position exceeds the Lim+ (upper softlimit) position or drops below the Lim– (lower
softlimit) position during any operation other than return-to-home operation, the motor decelerates before the
specified Lim+/Lim– position and stops at the Lim+/Lim– position.
A softlimit detection error (Err67) generates.
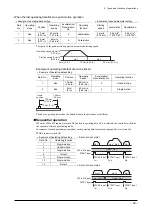
4.14 Speed filter
The speed filter sets a filter time constant that determines the response of the motorized actuator with respect
to operating commands.
When the filter time constant is increased, starting/stopping impact will decrease and vibration during
low-speed operation will also be reduced, which will consequently allow the motorized actuator to operate
smoothly.
However, the greater the filter time constant, the lower the operating command response becomes. Therefore,
set an appropriate value in accordance with the purpose and load of your motorized actuator.
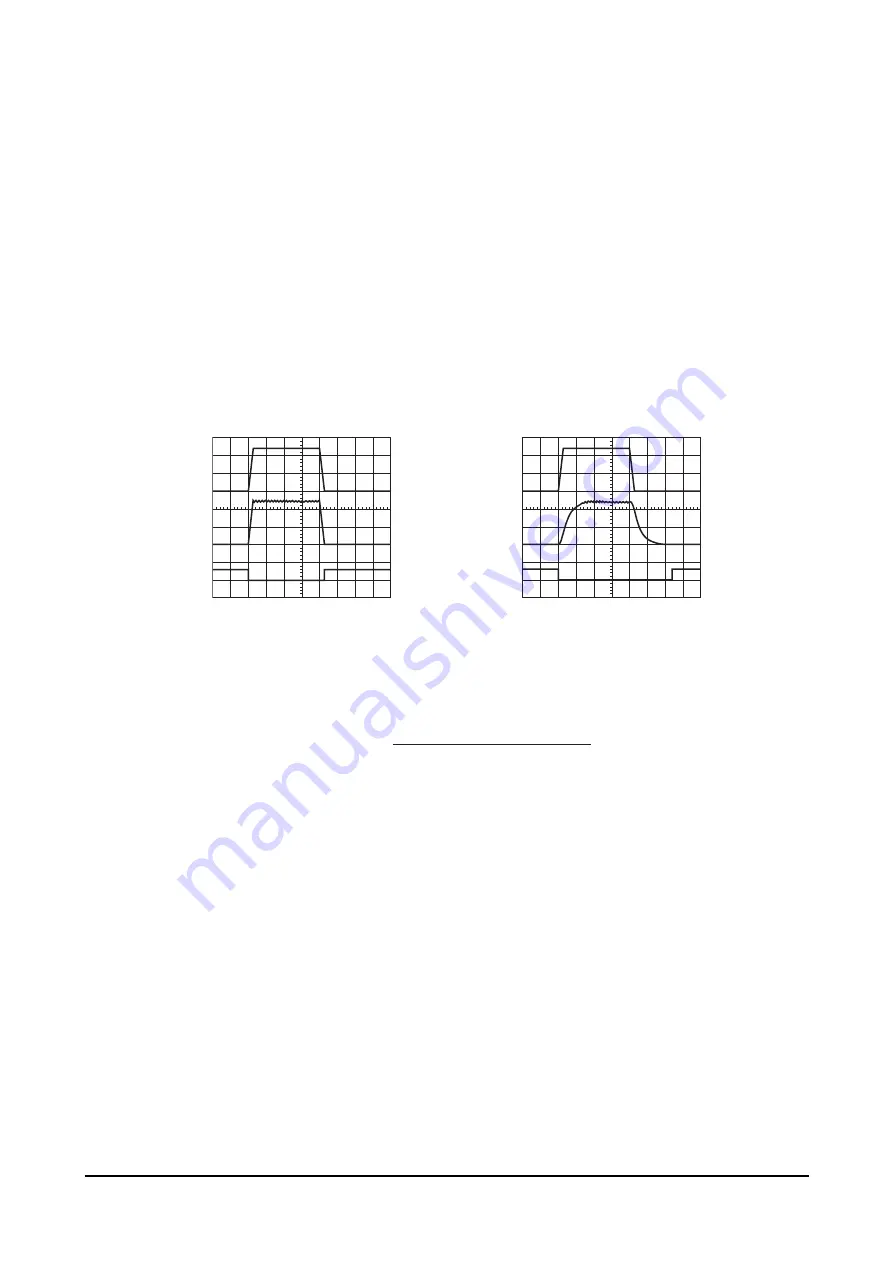
•
When the speed-filter time
constant is set to 1 ms
•
When the speed-filter time
constant is set to 100 ms
Command speed
Motorized actuator
speed
END output
Command speed
Motorized actuator
speed
END output
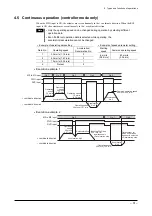
4.15 END signal
Sets the range in which the END signal will be detected.The END output will turn ON if the difference
between the command position and actual position is within the END output range when the motorized
actuator stops.
䋽㩷
±
Motor parameter “END signal width”
51200
Lead [mm (in.)]
END output range
㩷
[mm (in.)]
㬍
Example of END output range
If the END output width is 256 (initial value) and lead is 12 mm (0.47 in.), the END output range becomes
0.06 mm (0.0024 in.).
Summary of Contents for EZ limo ESMC-A2
Page 92: ......







































































