

















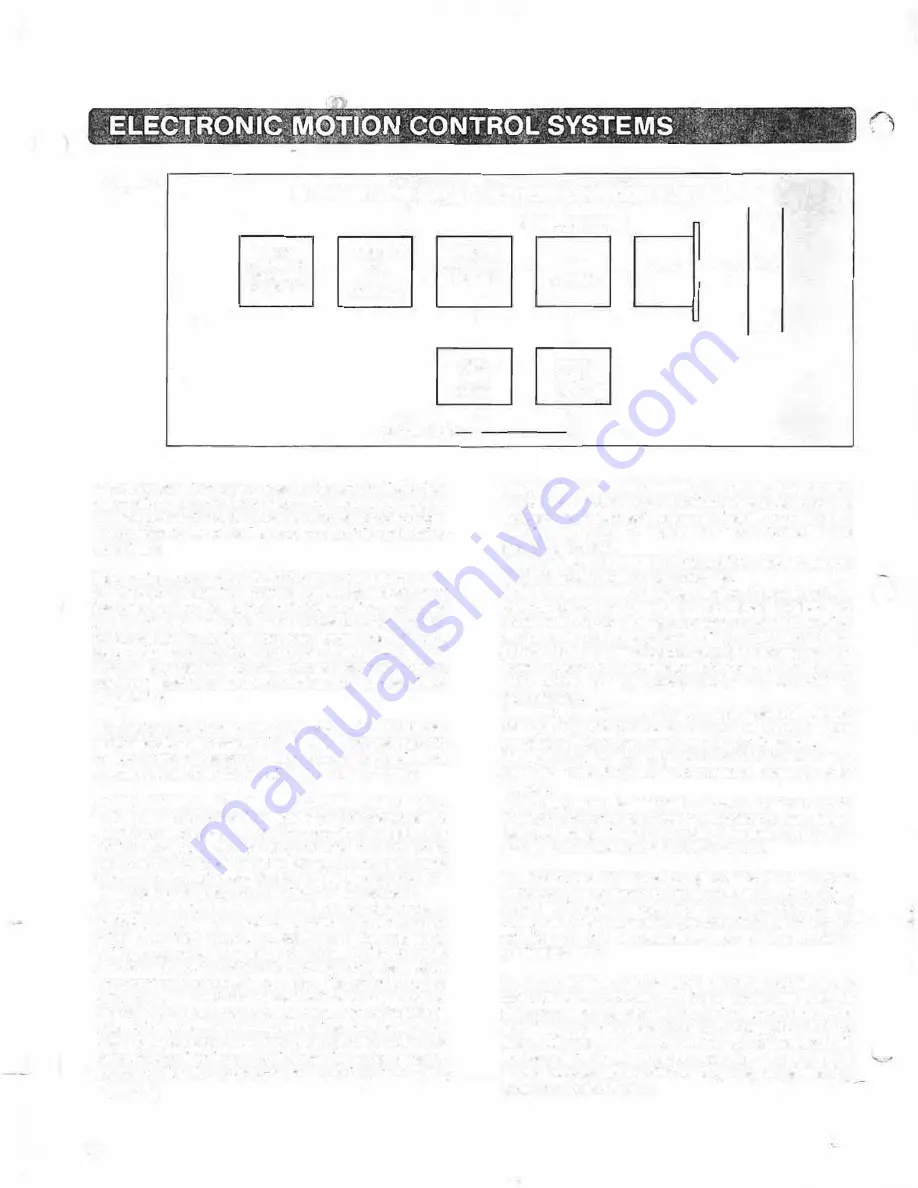
Figure 1
STEP MOTOR BASED MOTION CONTROL SYSTEM
,--
UPD PACKAGE
"Hosr·
INDEXER
LOGIC FDR
POWER
COMPUTER OR
-
OR
-
MOTOR PHASE
-
-
MOTOR
:=J-
LOAD
PROGRAMMABLE
PULSE
CONTROLLER
GENERATOR
I
AC 115VINPUT
With the rapidly increasing need for factory and industrial
automation. manufacturers large and small are turning to
our new genera lion of easy·to-use electronic motion con
trol devices for labor
-
sav
in
g and product1v1ty-enhanc1ng
machinery.
Electronically controlled motion is one of lhe fundamen
tal parts of au
t
oma
t
i
on
.
Increasingly. step motors have
become the favorite method of implementing controlled
molion. One of the many advantages of a step motor·
based system is that 11 can be used "open loop''. Since a
step motor moves a fixed number of degrees for each
input pulse. it can control position and speed without the
additional cost of a leedback device and its associated
electronics.
The basic components or an open loop s1ep motor based
motion system are shown in
Figure
1
.
Sometimes the
various parts of the system are referred lo by d1fferen1
names, bul all of these functions are still included:
HOST COMPUTER OR PROGRAMMABLE CON·
TROLLER:
This is the "intelligent'' part of the system. It
usually controls other parts of lhe machine as well as the
mo11on system 11 can be programmed to respond lo
inputs from switches or other sensors, and may send
information to the 1ncfexer lo control the number of steps,
the acceleralion rate. and slartlng and top s
pe
e
ds
.
INDEXER OR PULSE GENERATOR:
A
pulse generator
is liltle more than an oscillalor. sending pulses to lhe
driver al a l1xed speed Indexers have the additional
ability to count out a number of sle
p
s
�
An indexer may
also control acceleration and de
c
e
l
era
t
i
on
.
As a result
the motor can be made 10 run above its self·starting Ire·
quency (Is). and thus decrease the time 10 make a given
motion. The oulpul from a pulse generator or indexer Is
usually 1n low level (TIL) step and direction signals. The
step signal turns on and off for each step the motor is to
takP., and l�H': direction output 1s held high or low depend
ing on the d1recl1on (CW/E:8Wt-rne motor ,s to move.
(See
Figure
2.)
3
CONTROL
t
LOGIC
POWER
SUPPLY
t
AMPLIFIER
1
-
MOTOR
POWER
SUPPLY
j
LOGIC FOR MOTOR PHASE CONTROL:
This section
translates lhe step and direction signals sent by the
indexer into the correct motor winding On and Off com
bination, in order to make the motor rotate in lhe
desired direc1ion.
LOGIC POWER SUPPLY:
This sec11on supplies the low
level DC power for the logic circuits.
POWER AMPLIFIER:
The signals from the motor phase
.
,
control logic are amplified from low voltage signals to a
useful level that can run a stepping motor. This section
can range in complexity from a simple transistor switch
(L/R drive) with limited speed range, to a complex high
power pulse-width-modulated (ct,opper) drive like the
U PO driver, for high speed torque and outstanding
performance
MOTOR POWER SUPPLY:
The molar
requires
higher
voltage than the control electronics and much more
amperage
.
The motor power supply provides this
MOTOR:
A slepping motor converts the electrical input
from lhe Power Amplifier into rotational movements, or
"s1eps"
LOAD:
The load is whatever the user wants to m
ov
e
.
whether it be powered through a leadscrew, gear liming
bell, or directly dnven by the motor. The load can be tric-
11onal. inertial or a combination of the
tw
o
.
In the pasl each of these separate components had to be
wired togelher or inserted in10:a rack. and valuable lime
was spent in assembling, adj us ling and lrquble-shootmg
them The UPD mo1or/driver package 1sSUPERVEXTA's
solution lo lhis unnecessary use of the systems
engineer's time
.
As shown in
Figure1,
the UPD package combines lhe
motor driver and power supplies into one Unit, and the
driver is pre-set to match lhe motor included in the pack
age. The driver's inputs are optically-isolated lo allow for
easy interface with a wide vanety of controllers. This
leaves only a simple hook-up operalion - and with the
application of step and d1rechon signals. the result is prf
r
cisely controlled motion.







































































