



















( The New-PENTAGON 5-Phase is a� not a
Slllaflrelr)
"'
Accurate and reliable motion control is a fundamental
key to successful automation of any kind. Step motors
have become a vital link 1n lhis automation process with
their ability to change computer-generated input into
mechanical motion They are highly accurate. reliable
and simple to use because or their inherent ability lo
move a certain angle for each input pulse. Step motors
are widely used in appllcallons from medical equipment
to computer peripherals, to oflice copy machines and
factory machine tools.
With their ability lo accurately move and hold loads. stand
ard step motors are a boon to automation. but have two
annoying drawbacks - vibration (resonance) and low
speed
.
Until now, the mosl popular melhods of overcom
ing these elfects were to use either a microstep driver or
some type of damping. Dampers are effective, but space
restraints and the changing of their damping eflects with
temperature and time often preclude their use. Microstep
drivers are a solution to the effects ol resonance and vi
bration at very slow speeds ( <0.25 rpm), but lhe losses in
accuracy and torque, plus the fact that their vibraHon is
the same as a standard step motor al faster speeds, are
all far too costly to ignore.
A newer. more cost-effective method or overcoming the
effects of resonance and vibration is to use a Five-Phase
step motor
.
The Five-Phase stepping motor was originally
patented by the West German company Berger-Lahr.
Oriental Motor recognized the unique attributes of this
product and saw its great potential. After obtaining a
license, Oriental Motor introduced Five-Phase technology
in Japan; it was a hit and "Five-Phase Fever" set in.
5
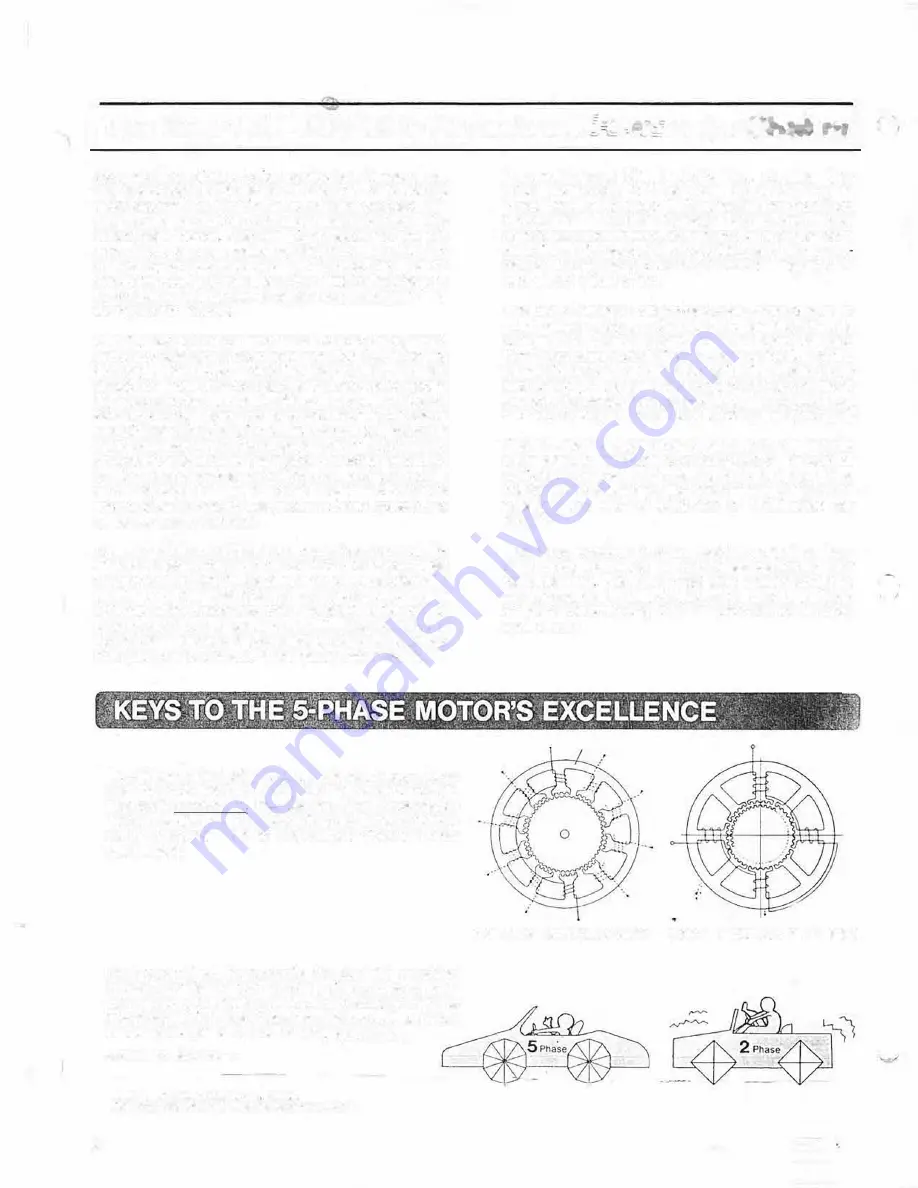
The difference in design between standard step motors
and the Five-Phase is subtle. but the performance dif
ference is
speclacular
Because the Five-Phase design
has an additional pair of magnetic poles. it runs substan
tially smoother wilh no noticeable vibration from
resonances.
As a comparison, for example, the car with ten-sided
wheels provides a much smoother ride that its counter
part with square wheels. This is roughly analogous to the
five pole pairs in a Five-Phase, and the 1wo pole pairs in a
standard two phase (or lour phase) step motor.
(continued next page)
Motor and dnvcr are covered by U.S Patents
fw�Phaso motors ate made under hcense ot Be
r
ger
-
La
lu
.
The engineers at Oriental Motor have elevated Five
Phase technology to a new level by developing the
innovative New-Pentagon UPD series of Five-Phase step
motor/driver. The New-Pentagon series step motor
drivers have even lower vibration and lower current con
sumption at high speeds (above 3,000 pps). This new ver
sion is also very easy to hook-up due to having only five
lead wires instead of ten.
This New-Pentagon design provides
more
torque to
much higher speeds with ex1rernely low vibrat1on. As
compared to a standard slep motor, the New-Pentagon
Five-Phase step motor/driver has only a fraction of the
torque npple for a quantum reduction in vibration (see
next section). Plus. the New·Pentagon driver can move
the motor to speeds in excess of 6.000 rpm (100,000 pps),
and has no torque drop-off to over 600 rpm (10,000 pps).
This new technology makes it possible for all of these
advantages to be obtained at only 75% of the cost of
equivalent microstep drivers. The New-Pentagon Five
Phase driver design also allows for half-stepping, for an
excellen1 resolution of 0.36/step or 1,000 steps per
revolution.
Five-Phase products are now used ln everything from
color copy machines to automated semiconductor
manufacturing The Five-Phase step motor's ability to
move smoothly with little vibration and without the effects
ol resonance is the key to its selection for use in these
applications.
FIVE PHASE STATOR DESIGN
2 OR 4 PHASE STATOR DESIGN