















10
Setting item
z
Highest speed
The highest speed of the Speed1 is selected with the SPD H/L switch (function
setting switch No.1).
Select either 200 r/min or 600 r/min for the highest speed.
The speed, which can be set with the speed setting switch, differs in
200 r/min and 600 r/min. Check a desired speed with the tables on p.14 to
p.15.
OFF: 600 r/min
ON: 200 r/min
Factory setting: OFF (600 r/min)
z
Setting method for the Speed2
The setting method for the Speed2 is selected with the SPD2 EN (function
setting switch No.2).
OFF: Fixed to a 10% speed of the Speed1
ON: Selected one from 16 different speeds in a range of 0.5 to 50% of the
Speed1
Factory setting: OFF (Fixed to a 10% speed of the Speed1)
z
Operating speed
The operating speed varies depending on the setting pattern.
•
Pattern 1
y
Speed1 ...........Check a desired speed from 256 different speeds in the tables
on p.14, and set using a combination of the ×16/SPD1 switch
and the ×1/SPD2 switch.
y
Speed2 ...........This is fixed to a 10% speed of the Speed1.
•
Pattern 2
y
Speed1 ...........Check a desired speed from 16 different speeds in the tables
on p.15, and set with the ×16/SPD1 switch.
y
Speed2 ...........Check a desired speed from 16 different speeds in the tables
on p.15, and set with the ×1/SPD2 switch.
z
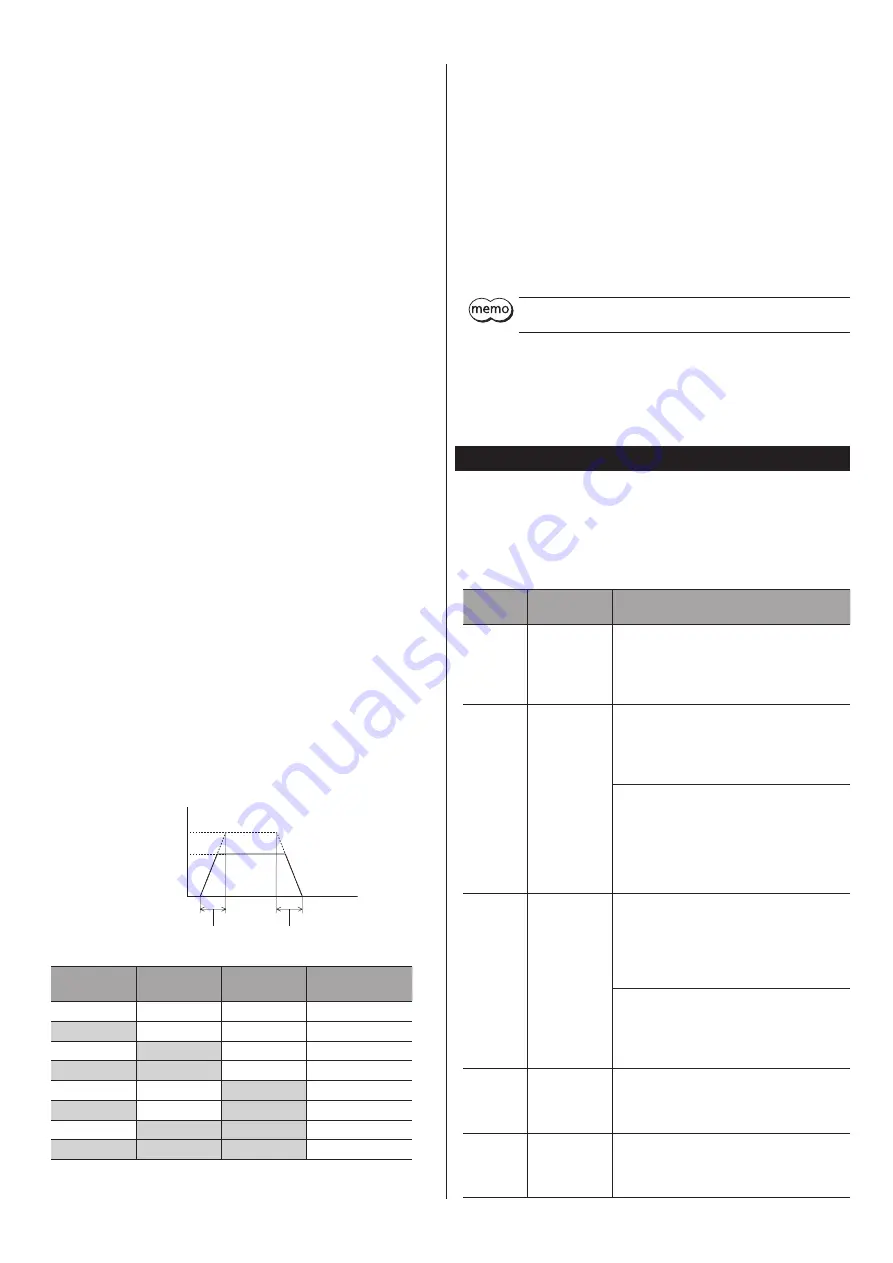
Acceleration time and deceleration time
The acceleration time refers to the time needed for the operating speed to
reach 600 r/min from 0 r/min. The deceleration time refers to the time needed
for the operating speed to reach 0 r/min from 600 r/min. The same time is
applied to all of the acceleration, deceleration, and changing speed.
Set using the ACC0 to ACC2 switches (function setting switch No.4 to No.6).
Factory setting: 0.50 s
Time [s]
Acceleration
time
Deceleration
time
Speed [r/min]
600
Setting speed
ACC0 (No.4)
ACC1 (No.5)
ACC2 (No.6)
Acceleration time
Deceleration time
OFF
OFF
OFF
0.00 s
ON
OFF
OFF
0.05 s
OFF
ON
OFF
0.10 s
ON
ON
OFF
0.20 s
OFF
OFF
ON
0.50 s
ON
OFF
ON
1.00 s
OFF
ON
ON
2.00 s
ON
ON
ON
3.00 s
z
Operating current rate and standstill current rate
•
Operating current rate
If the load is small and there is an ample allowance for torque, the motor
temperature rise can be suppressed by setting a lower operating current rate.
The actual operating current is a value that the rated operating current of the
driver is multiplied by the operating current rate.
Operating current = Driver rated current × Operating current rate
Select the operating current rate using the RUN switch (function setting
switch No.3).
OFF: Operating current rate 100%
ON: Operating current rate 70%
Factory setting: OFF (100%)
Set the operating current rate to 70% when using the
CVD524BR-
KSC
with an accessory circuit product cover.
•
Standstill current rate
When the motor stops, the current cutback function will be actuated to lower
the motor current to the standstill current. The standstill current rate is 50% of
the operating current.
Standstill current = Operating current × 50%
Alarm
When the driver's protective function triggers and an alarm generates, the
ALM output is turned OFF and the motor current is cut off. At the same time,
the PWR/ALM LED will blink in red. The cause of the alarm can be checked by
counting the number of times the PWR/ALM LED blinks.
Alarm list
Number of
LED blinks
Alarm type
Cause and remedial action
2
Overheat
[Cause]
The temperature of the driver circuit board
reached 85 °C (185 °F).
[Remedial action]
Review the ventilation condition.
3
Overvoltage
[Cause]
A voltage exceeding the specification value was
applied.
[Remedial action]
Check the input voltage of the power supply.
[Cause]
A large inertial load was stopped abruptly or
vertical operation was performed.
[Remedial action]
If this alarm generates during operation, reduce
the load or increase the acceleration/deceleration
time.
5
Overcurrent
[Cause]
An excessive current was flowed through the
driver output circuit for motor.
[Remedial action]
Turn off the power and check that the motor,
cable and driver are not damaged.
[Cause]
The motor was made a quick stop or a rapid
deceleration.
[Remedial action]
Review the operating conditions.
9
EEPROM error
[Cause]
The stored data in the driver was damaged.
[Remedial action]
Contact your nearest Oriental Motor sales office.
Lit
CPU error
[Cause]
CPU malfunctioned.
[Remedial action]
Cycle the power.







































































