




























IG-267-EN versión 01; 07/04/2017
42
Detection, automation and control functions
General Instructions
ekor
.rpa
5. Detection, automation and control functions
5.1. Recloser automation
5.1.1. Functionality
The recloser automation is implemented in the
ekor
.rpa-100 systems used in protection cubicles with
circuit-breaker. This allows automatic line reclosing, once
one of the overcurrent units has ordered tripping and the
switch has opened.
This function is primarily used in overhead lines, where a
great number of faults are usually transient: electrical arcs
due to the proximity of two conductors caused by the wind,
tree falling on lines, etc. Transient faults can be cleared by
momentarily de-energising the line. Once enough time has
elapsed to deionise the air, there is a very high probability
that the fault will not re-occur when power is re-established.
The recloser function implemented in the
ekor
.rpa-100
systems is of three-core type, with simultaneous reclosing
for the three phases. The recloser can carry out up to four
reclosing attempts, and it is possible to define a different
reclosing time for each of them. Furthermore, there are
independent recloser time settings for earth faults or
between phases.
The recloser cycle starts when any of the overcurrent units
trip whilst the recloser is in automatic and unblocked. Under
these conditions, the relay waits for the first reclosing time
and sends a command signal for the switch to close.
When the switch closes, the block timing starts counting. As
with the recloser times, there are 2 independent blocking
times: that associated to earth faults, and that associated
to faults between phases. The reclosing is considered
successful if, once the block timing has elapsed, the fault
disappears after the switch closes. Any trip that occurs
afterwards is considered to be caused by a new fault and
the first reclosing timing restarts.
If, after the first closing, a new trip occurs before blocking
time has elapsed, it is considered to be caused by the same
fault, meaning the function will start the timing of the
second reclosing.
The logic explained in the above paragraph will continue
to be applied until the number of configured reclosings is
exhausted. This means that the fault is permanent and it will
change to the final trip condition.
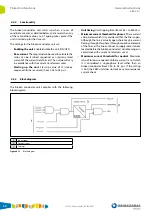
5.1.2. VREF
There is the option of controlling reclosing by way of a
status programmable in the user PLC (ESP_VREF). Whenever
this function is used, this status must be active after tripping
in order to allow reclosing. Whenever it is active, it will
continue with the recloser cycle as described above. On the
other hand, the automation will wait for a time equal to the
Tvref setting if the aforementioned status is disabled after
tripping, and will definitively trip if it is not enabled over the
course of this time.
This functionality can be useful when monitoring voltage
in busbars. Reclosings can be made conditional on the
presence of voltage in busbars by associating voltage in
busbars to the programmable status.
By defect, the ESP_VREF status will be 1, with the function
related to Vref remaining disabled.
Summary of Contents for ekor.rpa Series
Page 115: ......







































































