





























VR2 wheelchair control
490E75=0_C
140 | Ottobock
Parameter
Setting range Description
Number of drive
profiles
Profiles 0–5
The VR2 control can be operated with a single or with multiple driving profi-
les.
A driving profile consists of programmable parameters such as acceleration,
deceleration, turn acceleration, turn deceleration, forward speed, reverse
speed and turning speed. The number of driving profiles is specified via the
programmable parameter "Number of drive profiles".
If the parameter "Number of drive profiles" is set to 0 there is one setting for
each of the parameters listed above. The maximum speed setting of the con-
trol system can be changed using the keys for maximum speed or extension/
reduction of the profiles.
If the parameter setting for "Number of drive profiles" has a value of 2 to 5 the
corresponding number of driving profiles exists and each of the listed para-
meters can be set separately in each profile. The maximum speed or profile
extension/reduction buttons are then used to switch between the available
profiles.
INFORMATION: Although a number of drive profiles can be set to 1, the
operation is the same as setting to 0 but without the ability to change
maximum speed settings.
Minimum accele-
ration
1% increments
of parameter
"Acceleration"
Setting of minimum forward and backward acceleration of the wheelchair.
This percentage acceleration value appears if the speed has been set to 1.
Programming example:
• Acceleration = 80 and Minimum Acceleration = 25%
• Acceleration at step 1 = 25% of 80 = 20
• Speed settings 2, 3 and 4 will interpolate linearly between 20 and 80
• Acceleration at step 2 = 35
• Acceleration at step 3 = 50
• Acceleration at step 4 = 65
Minimum decele-
ration
1% increments
of parameter
"Deceleration"
Setting of the minimum forward and backward deceleration of the wheelchair.
This percentage deceleration value appears if the speed has been set to 1.
Programming example:
• Deceleration = 80 and Minimum Deceleration = 25%
• Deceleration at step 1 = 25% of 80 = 20
• Speed settings 2, 3 and 4 will interpolate linearly between 20 and 80
• Deceleration at step 2 = 35
• Deceleration at step 3 = 50
• Deceleration at step 4 = 65
Minimum turn
acceleration
1% increments
of parameter
"Turn accelera-
tion value"
Setting of minimum turn acceleration of the wheelchair.
This percentage turn acceleration value appears if the speed has been set
to 1.
Programming example:
• Turn Acceleration = 80 and Minimum Turn Acceleration = 25%
• Turn Acceleration at step 1 = 25% of 80 = 20
• Speed settings 2, 3 and 4 will interpolate linearly between 20 and 80
• Turn acceleration at step 2 = 35
• Turn acceleration at step 3 = 50
• Turn acceleration at step 4 = 65
Summary of Contents for 490E75 Series
Page 1: ...490E75 0_C Service manual...
Page 38: ...Service work 490E75 0_C 38 Ottobock 57 58 59 60 61 62 63...
Page 41: ...Service work 490E75 0_C Ottobock 41 70 71 72 73 74 tt 75 76...
Page 55: ...Service work 490E75 0_C Ottobock 55 103 104 105 106 107 108 109 110...
Page 108: ...Service work 490E75 0_C 108 Ottobock 227 228 229 t 230 231 232...
Page 112: ...Service work 490E75 0_C 112 Ottobock 237 238 239 240 241...
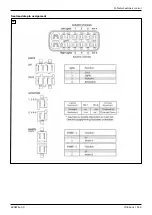
Page 143: ...R Net wheelchair control 490E75 0_C Ottobock 143 Seat module pin assignment 287...
Page 161: ...490E75 0_C Ottobock 161...
Page 162: ...490E75 0_C 162 Ottobock...







































































