RT1003 Manual
Revision:
190628
87
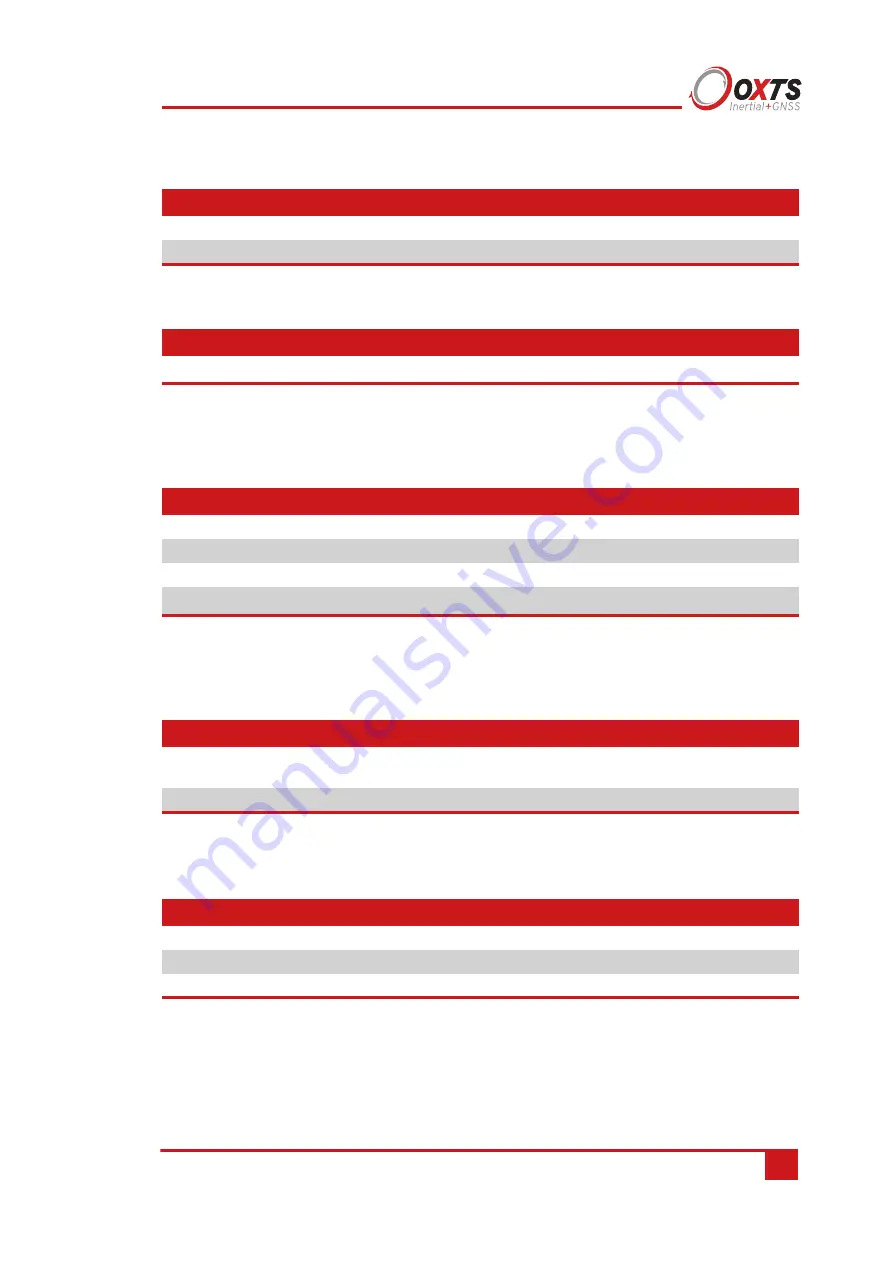
Table 22.
Identifier 601h (1537), LatitudeLongitude
Bit
Len
Type
Unit
×
+
Description
Name
0
32
S
°
1e-7
0
Latitude
PosLat
32
32
S
°
1e-7
0
Longitude
PosLon
Table 23.
Identifier 602h (1538), Altitude
Bit
Len
Type
Unit
×
+
Description
Name
0
32
S
m
0.001
0
Altitude
Altitude
a
a. By default the altitude is output relative to mean sea level, not WGS 84. The datum can be
changed using NAVconfig.
Table 24.
Identifier 603h (1539), Velocity
Bit Len Type Unit
×
+
Description
Name
0
16
S
m/s
0.01 0 OxTS NED frame north velocity
VelNorth
16
16
S
m/s
0.01 0 OxTS NED frame east velocity
VelEast
32
16
S
m/s
0.01 0 OxTS NED frame vertical (down) velocity
VelDown
48
16
U
m/s
0.01 0 Horizontal speed
a
a. Horizontal speed is the vector addition of north and east velocities. For forward speed (which
can go negative) see message 604h.
Speed2D
Table 25.
Identifier 604h (1540), VelocityLevel
Bit Len Type Unit × +
Description
Name
0
16
S
m/s
0.01 0 OxTS horizontal frame longitudinal (forward)
velocity
VelForward
a
a. The forward velocity can go negative when driving backwards.
16
16
S
m/s
0.01 0 OxTS horizontal frame lateral (right) velocity
VelLateral
Table 26.
Identifier 605h (1541), AccelVehicle
Bit Len Type Unit × +
Description
Name
0
16
S
m/s2 0.01 0 OxTS output frame longitudinal (forward) IMU acceleration AccelX
16
16
S
m/s2 0.01 0 OxTS output frame lateral (right) IMU acceleration
AccelY
32
16
S
m/s2 0.01 0 OxTS output frame vertical (down) IMU acceleration
AccelZ