




























Oxford Technical Solutions Ltd. http://www.oxts.com
Page 14 of 42
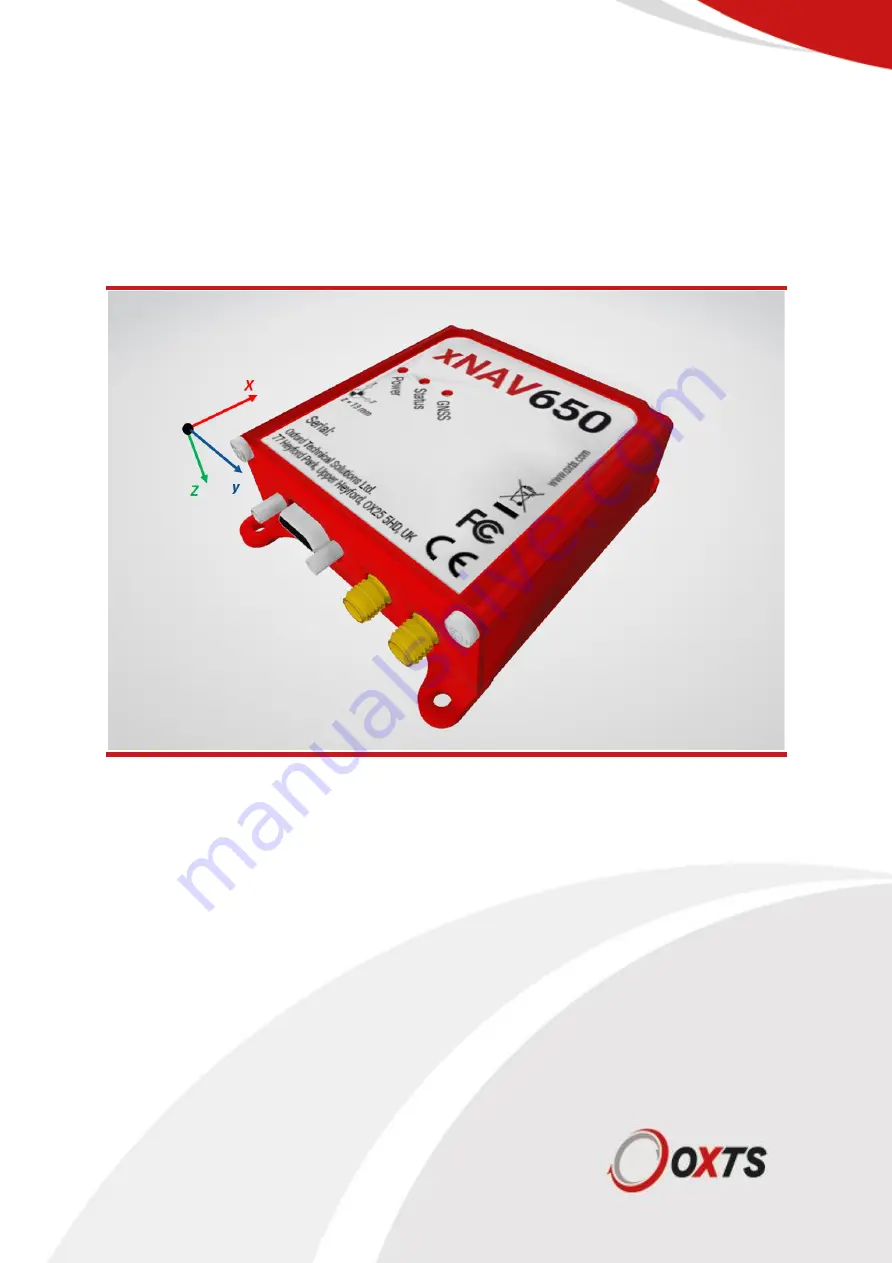
Coordinate frame
The IMU reference frame shown in Figure 4 is popular with navigation systems
– where the positive X-
axis points forwards, the positive Y-axis points right and the positive Z-axis points down. The xNAV650
can be mounted in any orientation, it is not necessary for its axes to match those of the host vehicle.
The configuration file will specify the transformation from the IMU frame to the vehicle frame.
Figure 4: xNAV650 coordinate frame axes
Summary of Contents for xNAV650
Page 1: ...xNAV650 Hardware Manual 20 Years Navigation Experience in one small INS ...
Page 38: ...Oxford Technical Solutions Ltd http www oxts com Page 38 of 42 Appendix 2 Drawings ...
Page 39: ...Oxford Technical Solutions Ltd http www oxts com Page 39 of 42 ...
Page 40: ...Oxford Technical Solutions Ltd http www oxts com Page 40 of 42 Revision history ...







































































