



















User-defined
functions
Mid-range instability control - eliminates loss of torque and
possible motor stalling when operating at mid-range speeds. This
instability is a phenomenon of the electronic, magnetic, and
mechanical characteristics of a stepping motor system. When
enabled, mid-range instability control damps mid-range
oscillations by advancing or delaying the switching of the output
transistors relative to the incoming pulse train.
Step size - sets the amount of rotation per step. The five settings
range from full step to fractions of a full step (microsteps). The
microstep settings range from 1/2 to 1/125 microsteps per step for
up to 25,000 steps/revolution with a standard 1.8
o
stepper motor.
Idle current reduction (ICR) - reduces motor winding current
by 50% during motor dwell periods. ICR begins one second after
the last input step pulse occurs.
Current - sets the output current supplied to the motor. The
available RMS current settings are 5, 6, 7.5, and 8 amps.
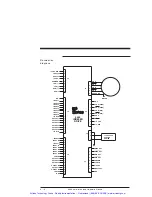
Indexer
features
The indexer circuitry provides programmable motion control and
allows flexible interfacing to the application.
Pacific Scientific StepperBASIC™ - programming language
with over 100 instructions, combines the ease of the
programming language BASIC with sophisticated motion control
features.
Serial port RS-232 or RS-422/485 communications -interfacing
the user computer or terminal for programming and/or computer
control. RS-422/485 control allows multiple 5645 units to be
controlled from a single computer or terminal.
12 outputs - user programmable outputs to external devices. One
output is program-selectable to indicate motor moving.
16 inputs - user programmable inputs from external devices. Six
inputs can be pre-defined for limit, start, stop, and jog functions.
1 - 2
5645 Installation and Hardware Manual
Artisan Technology Group - Quality Instrumentation ... Guaranteed | (888) 88-SOURCE | www.artisantg.com







































































