



























28
10. Auto-tuning
In order to set each value of P, I, D and ARW automatically, the auto-tuning process should be made
to fluctuate to obtain an optimal value. One of 3 types of fluctuation below is automatically selected.
For DC input, the auto-tuning process will fluctuate around the SV for conditions of [1], [2] and [3] below.
Notice
• Perform the PID auto-tuning during the trial run.
• During the PID auto-tuning, none of the setting items can be set.
• If power failure occurs during the PID auto-tuning, the tuning stops.
• Sometimes the auto-tuning process will not fluctuate if auto-tuning is performed at or near room
temperature. Therefore auto-tuning might not finish normally.
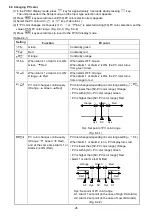
[1] In the case of a large difference between the SV and processing temperature as the temperature
is rising
When AT bias is set to 20 , the AT process will fluctuate at the temperature 20
lower than the SV.
(1) Calculating PID constant
(2) PID constant calculated
(3) Controlled by the PID constant
set by auto-tuning.
(4) AT bias value
(Fig. 10-1)
[2] When the control is stable or when control temperature is within
20
of the SV
The AT process will fluctuate around the SV.
(1) Calculating PID constant
(2) PID constant calculated
(3) Controlled by the PID constant
set by auto-tuning.
(Fig. 10-2)
[3] In the case of a large difference between the SV and processing temperature as the temperature
is falling
When AT bias is set to 20 , the AT process will fluctuate at the temperature 20
higher than the SV.
(1) Calculating PID constant
(2) PID constant calculated
(3) Controlled by the PID constant
set by auto-tuning.
(4) AT bias value
(Fig. 10-3)
(1)
(2)
(3)
(4)
AT starting point
SV
Temperature
Time
AT starting point
(1)
(2)
(3)
Temperature
SV
Time
AT starting point
(1)
(2)
(3)
(4)
Temperature
SV
Time
Temperature 20
higher than the SV
Temperature 20
lower than the SV







































































