


























−
B25
−
−
B24
−
English
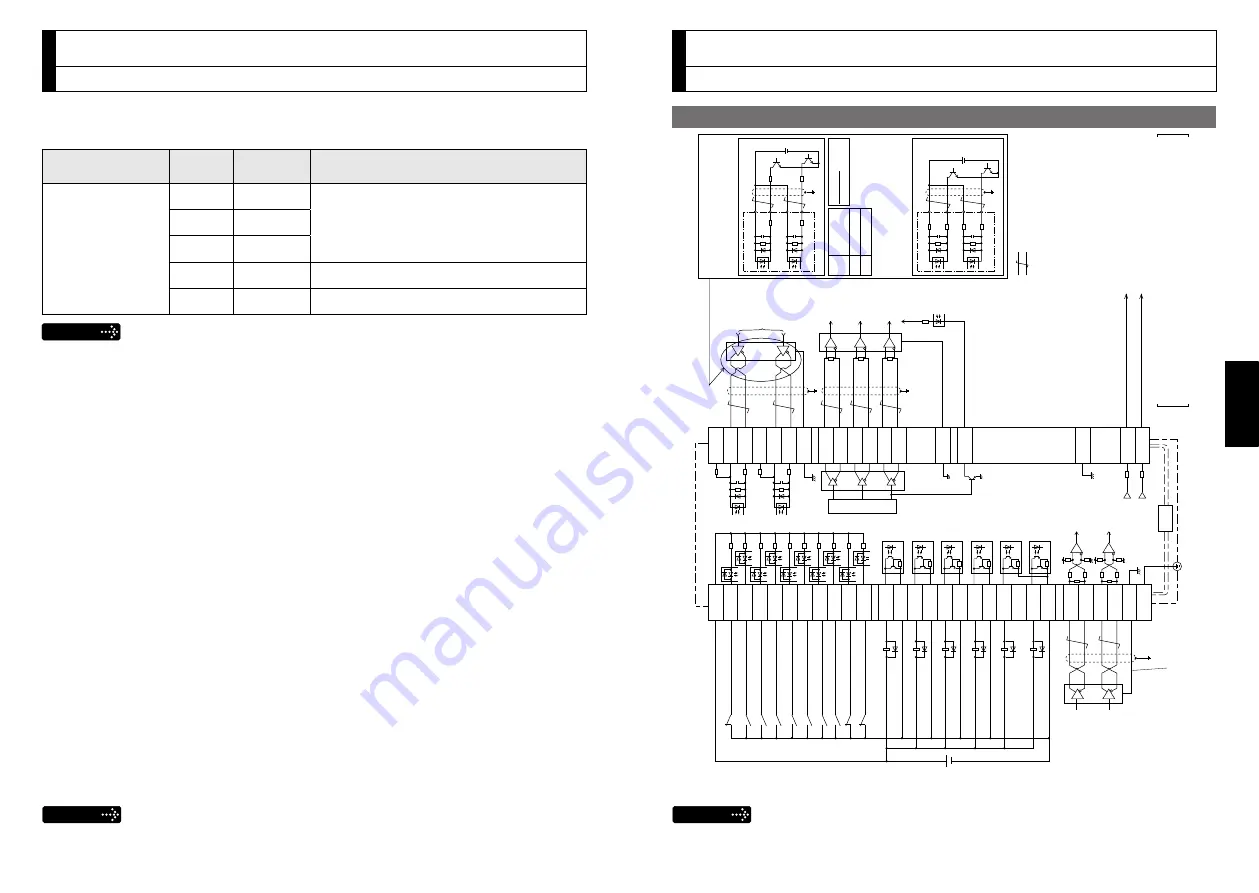
3. System Configuration and Wiring
Wiring to the connector, X4
Wiring Example of Position Control Mode
The functions of the following pin can be changed using parameters. Input: 8, 9, 26, 27, 28, 29, 30, 31, 32, 33 Output: 10-11, 12, 34-35, 36-37, 38-39, 40
2.2 k
Ω
2.2 k
Ω
2.2 k
Ω
2.2 k
Ω
17
43
42
In case of open collector I/F
7
COM+
PULS2
SIGN1
SIGN2
GND
OA+
OA
-
OB+
OB
-
OZ+
OZ
-
GND
CZ
GND
SP
IM
4
3
1
2
5
6
13
21
22
48
24
25
19
49
23
1 k
Ω
1 k
Ω
PULS1
OPC2
OPC1
INH
CL
SR
V-ON
GAIN
DIV1
VS-SEL1
C-MODE
A-CLR
POT
NOT
S-RDY
+
S-RDY
-
ALM+
INP+
BRKOFF
+
BRKOFF
-
TLC
V
DC
12 to 24 V
ZSP
COM
-
SIGNH1
SIGNH2
PULSH1
PULSH2
GND
FG
INP
-
ALM
-
33
30
29
27
28
32 31
9
8
35
34
37
36
39
38
11
10
40
12
41
44
45
13
50
26
Z-phase output (open collector)
3
PULS1
4
PULS2
X4
46
47
20 k
Ω
2 k
Ω
2 k
Ω
20 k
Ω
120
Ω
20 k
Ω
2 k
Ω
2 k
Ω
20 k
Ω
120
Ω
220
Ω
V
DC
R
5
SIGN1
6
SIGN2
220
Ω
R
1
OPC1
4
PULS2
220
Ω
24 V
DC
2
OPC1
6
SIGN2
220
Ω
2.2 k
Ω
2.2 k
Ω
(1) When you use the external resistor with 12 V and 24 V power supply
(2) When you do not use the external resistor with 24
V
power supply
Velocity monitor output
Torque monitor output
Command pulse input A
(Use with 500 kpps or less.)
Divider
A-phase output
B-phase output
Z-phase output
Command pulse input B (Use with 4 Mpps or less.)
Be sure to connect.
V
DC
12 V 24 V
Specifications
of R
1 k
Ω
1/2 W
2 k
Ω
1/2 W
V
DC
-1.5
R
+220
≒
10 mA
Servo-ON input
Gain switching input
Electronic gear switching input 1
Control mode switching input
Damping control switching input 1
Alarm clear input
Positive direction over-travel inhibition input Negative direction over-travel inhibition input
Servo-Ready output
Servo-Alarm output
Positioning complete output
External brake release output
Torque in-limit output
Zero speed detection output
Deviation counter clear input
Command pulse inhibition input
4.7 k
Ω
220
Ω
2.2 k
Ω
2.2 k
Ω
220
Ω
2.2 k
Ω
2.2 k
Ω
( represents twisted pair
.)
3. System Configuration and Wiring
Wiring to the connector, X1
This is used for USB connection to a personal computer. It is possible to change the
parameter setting and perform monitoring.
Application
Symbol Connector
Pin No.
Contents
USB signal terminal
VBUS
1
Use for communication with personal
computer.
D−
2
D
+
3
—
4
Do not connect.
GND
5
Connected to ground of control circuit.
Caution
Use commercially available USB mini-B connector for the driver.
Remarks
X1 to X7 are used for the secondary circuit. To connect these terminals to the primary
power supply (particularly, the 24 VDC power supply for brake), insulation is required.
Do not connect these terminals to the same power supply.
Remarks
X1 to X7 are used for the secondary circuit. To connect these terminals to the primary
power supply (particularly, the 24 VDC power supply for brake), insulation is required.
Do not connect these terminals to the same power supply.







































































