




























- 30 -
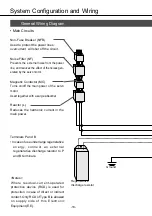
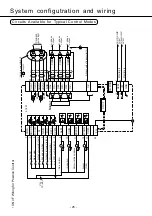
System configuration and wiring
S i g n a l
P i n
S y m b o l
F u n c t i o n
I / F
No.
c i r c u i t
Input Signals (Position Control) and their Functions
S i g n a l
P i n
S y m b o l
F u n c t i o n
I / F
No.
c i r c u i t
C o m m a n d
p u l s e
C o m m a n d
s i g n
• This is the input terminal for command pulses. The maximum allowable
input frequency is 500 kpps for line amplifier input and 200 kpps for
open collector input. The amplifier is the high-speed photocoupler
of TOSHIBA TLP554 or equivalent.
• The input impedance of PULSE and SIGN signals is 220Ω.
• Command pulses can be input in three different ways. Use Pr42 to
select one of the following. (See App.26.)
1) Quadrature (A and B) input
2) CW (PULSE)/CCW (SIGN) pulse input
3) Command pulse (PULS)/Sign (SIGN) input
2 2
2 3
2 4
2 5
P U L S 1
P U L S 2
S I G N 1
S I G N 2
PI
page 33
7
8
C W L
C C W L
• If COM- is opened when the movable part of the
machine has moved to CW exceeding the limit, the
motor does not generate torque.
• If the COM- is opened when the movable part of the
machine has moved CCW exceeding the limit, the
motor does not generate torque.
• When Pr04 (Overtravel Limit Input Disabled) = 1, CWL
and CCWL inputs are disabled. The default is
"Disabled" (1).
• The dynamic brake can be made operable during CWL/
CCWL inputs valid. Use Pr66 (Dynamic Brake
Inactivation at Overtravel Limit) to make the dynamic
brake operable. The default is to allow the dynamic
brake to operate. (Pr66 value is 0.)
SI
page 33
SI
page 33
CW overtravel
inhibit
CCW overtravel
inhibit







































































