




























No. SX-DSV02472 -
111-
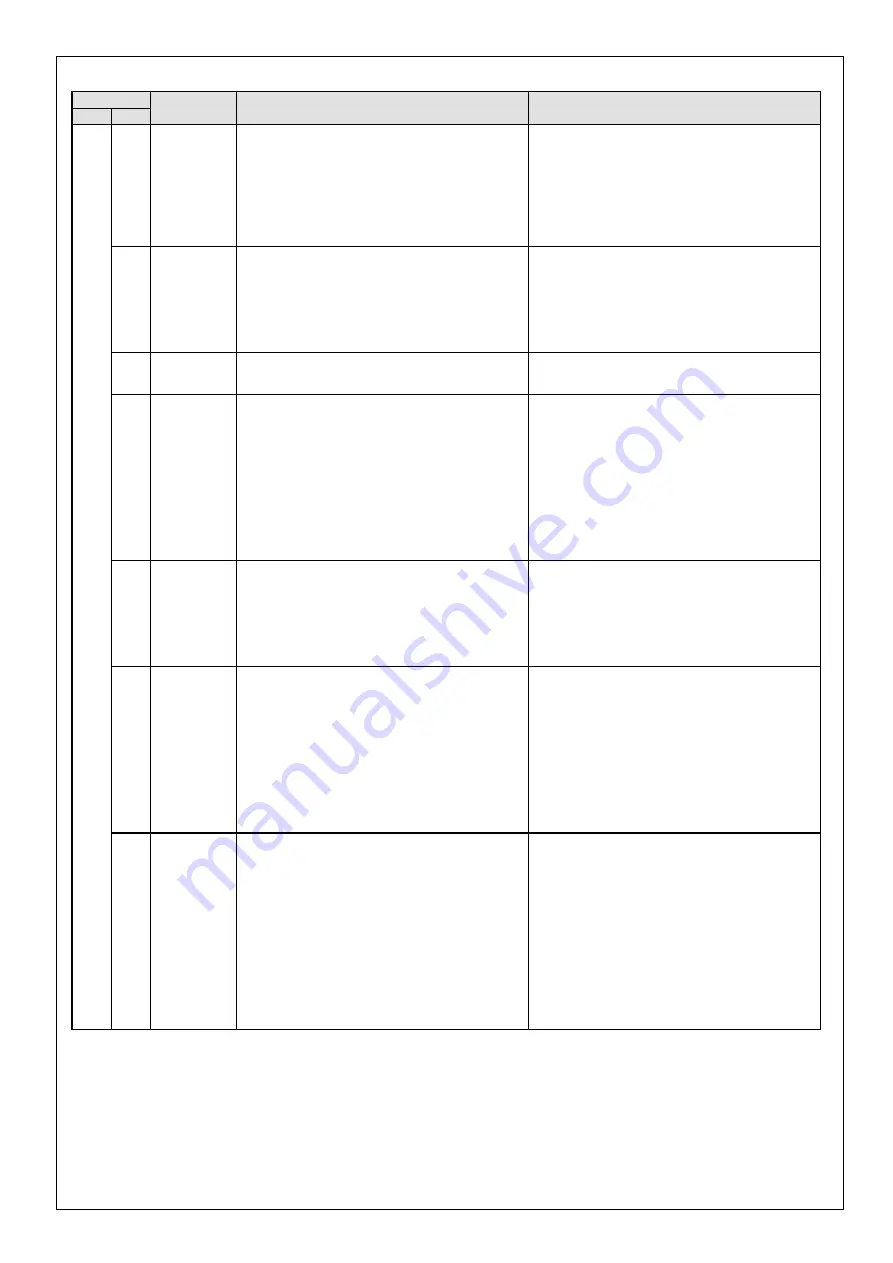
Error No.
Protective
function
Causes
Measures
Main
Sub
80
0
ESM
unauthorized
request error
protection
The change state request which cannot change from the
present state was received.
Init
to SafeOP
Init
to OP
PreOP to OP
OP to Bootstrap
PreOP to Bootstrap
SafeOP to Bootstrap
The change state request of higher rank equipment is checked.
1
ESM undefined
request error
protection
The change state request which does not have a definition
(except the following) was received.
1 : Request Init State
2 : Request Pre-Operational State
3 : Request Bootstrap State
4 : Request Safe-Operational State
8 : Request Operational State
The change state request of higher rank equipment is checked.
2
Bootstrap
requests error
protection
The following change state request was received.
3 : Request Bootstrap State
The change state request of higher rank equipment is checked.
3
Incomplete PLL
error protection
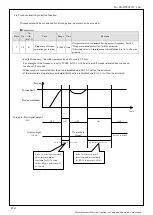
Phasing and servo communication(PLL lock) could not be
completed even after the lapse of 1s after the start of the
synchronization process.
<In case of DC>
- Check setting of DC mode.
- It is checked whether propagation delay compensation or
drift compensation is correct.
<In case of SM2>
- It is checked whether the transmitting timing of PDO from
higher rank equipment is constant.
- Please check whether there is any problem in
wiring of an EtherCAT communication cable.
- Please check whether the excessive noise has started the
EtherCAT communication cable.
4
PDO watchdog
error protection
At the time of PDO communication (at the time of SafeOP
or OP state), when the increment of the ESC register
address 0442h (Watchdog Counter Process Data) is
carried out, it generates.
bit10 of AL Event Request(0220h) did not turn on the
conditions by which an increment is carried out at the time
set up in the ESC register addresses 0400h and 0420h.
- It is checked whether the transmitting timing of PDO from
higher rank equipment is constant(not stop).
- Increase the timeout value of the PDO watchdog detection.
- Check whether there is any problem in wiring of an
EtherCAT telecommunication cable.
- Check whether the excessive noise has started the
EtherCAT communication cable.
6
PLL error
protection
In the ESM state, phasing servo and communication(PLL
lock) separated during operation in the state of SafeOP or
OP.
<In case of DC>
- Check setting of DC mode.
- It is checked whether propagation delay compensation or
drift compensation is correct.
<In case of SM2>
- It is checked whether the transmitting timing of PDO from
higher rank equipment is constant.
- Check whether there is any problem in wiring of an
EtherCAT communication cable.
- Check whether the excessive noise has started the
EtherCAT communication cable.
7
Synchronization
signal error
protection
More than the threshold value that the omission of the
interruption processing by SYNC0 or IRQ set up by
bit0-3 of Pr7.42(Maximum continuation communication
error) in after the completion of synchronous processing
generated.
<In case of DC>
- Check setting of DC mode.
- It is checked whether propagation delay compensation or
drift compensation is correct.
<In case of SM2>
- It is checked whether the transmitting timing of PDO from
higher rank equipment is constant.
- Check whether there is any problem in wiring of an
EtherCAT communication cable.
- Check whether the excessive noise has started the
EtherCAT communication cable.
- The preset value of Pr7.42(Maximum continuation
communication error) bit0-3 is enlarged.
(To be continued)
R1.05
Motor Business Division, Appliances Company, Panasonic Corporation







































































