


























No. SX-DSV02829 -
98-
2)
How to use
Set the gain switching mode for the control mode to be used, and enable the gain switching function through Pr
1.14 2nd gain setup (set Pr 1.14 to 1).
Setup value
Switching condition
Gain switching condition
0
Fixed to 1st gain
Fixed to the 1st gain (Pr 1.00 to Pr 1.04).
1
Fixed to 2nd gain
Fixed to the 2nd gain (Pr 1.05 to Pr 1.09).
2
For manufacturer’s use
Please do not set.
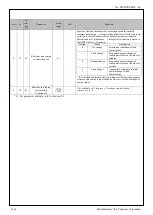
3
Torque command is large
• Shift to the 2nd gain when the absolute value of the torque command exceeded
(level + hysteresis) (%) previously with the 1st gain.
• Return to the 1st gain when the absolute value of the torque command was kept
below (level–hysteresis) (%) previously during delay time with the 2nd gain.
4
Velocity command variation is
larger.
• Valid only during velocity control.
• Shift to the 2nd gain when the absolute value of the velocity command
variations exceeded (level + hysteresis) (10r/min/s) previously with the 1st
gain.
• Return to the 1st gain when the absolute value of the velocity command
variations was kept below (level–hysteresis) (10 r/min /s) during delay time
previously with the 2nd gain.
* The 1st gain is fixed while the velocity control is not applied.
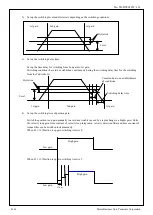
5
Velocity command is large
• Valid for position and velocity controls.
• Shift to the 2nd gain when the absolute value of the velocity command
exceeded (level +hysteresis) (r/min) previously with the 1st gain.
• Return to the 1st gain when the absolute value of the velocity command was
kept below (level- hysteresis) (r/min) previously during delay time with the
2nd gain.
6
Position deviation is large
• Valid for position controls.
• Shift to the 2nd gain when the absolute value of the positional deviation
exceeded (level +hysteresis) (pulse) previously with the 1st gain.
• Return to the 1st gain when the absolute value of the positional deviation was
kept below (level–hysteresis) (pulse) previously over delay time with the 2nd
gain.
* Unit of level and hysteresis (pulse) is set with feedback scale resolution.
* The positional deviation in these contents indicates the deviation between the
internal command position and actual position after the filter regardless of the
set value of Pr7.23: bit 14.
(To be continued)
R1.00
Motor Business Unit, Panasonic Corporation







































































