


























No. SX-DSV02829 -
113-
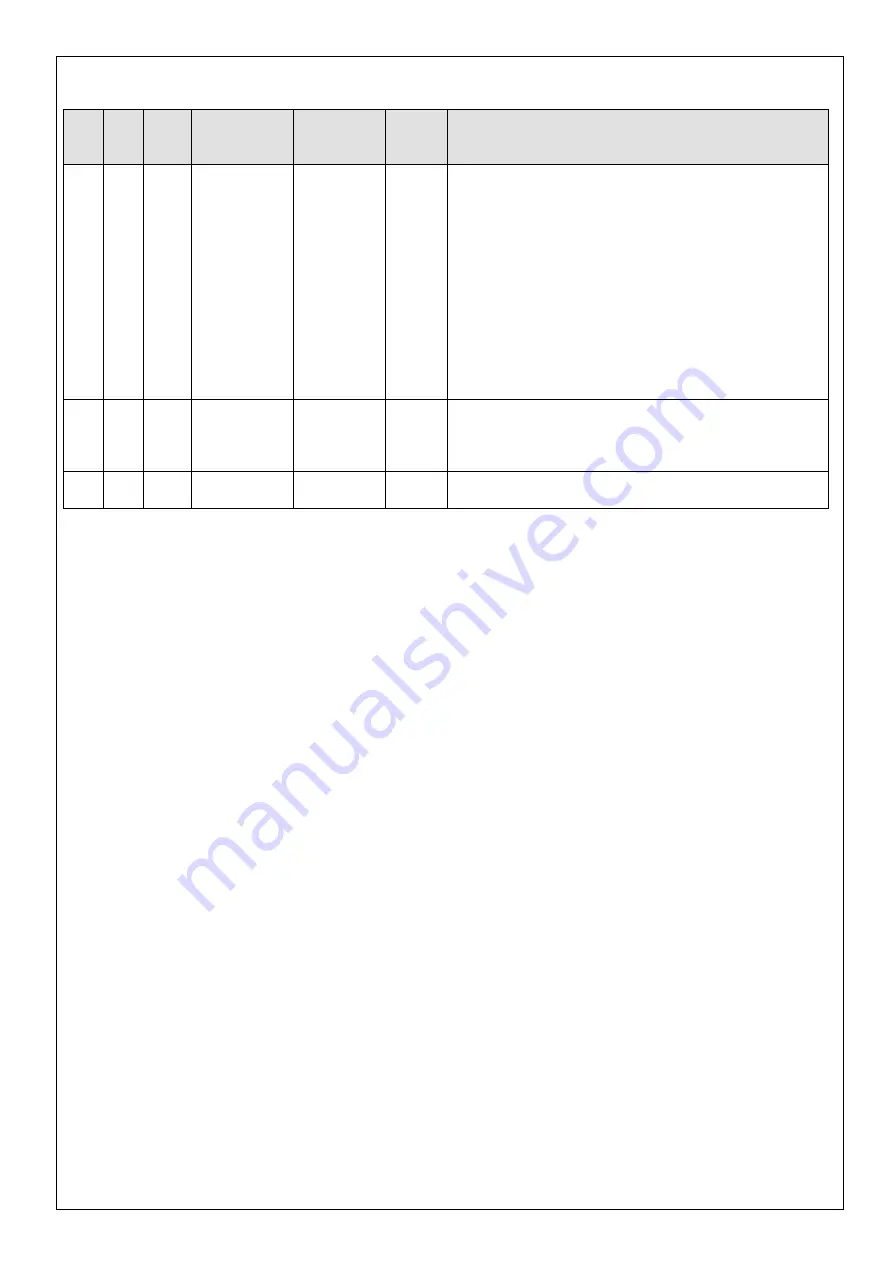
(3) Parameters
Class
No.
At-
trib-
ute *1)
Title
Range
Unit
Function
6
10
B
Function
expansion setup
0–1023
—
Sets bits related to disturbance observer.
bit 1 0: Invalid
1: Valid
bit 2 0: Always valid
1: Valid only when 1st gain is selected.
* bit 0 = LSB
Example:
To use the disturbance observer in the enabled mode only when 1st
gain is selected:
Setup value = 6
To use the disturbance observer always in the enabled mode:
Setup value = 2
6
23
B
Disturbance
torque
compensating
gain
-100–100
%
Set up compensating gain against disturbance torque.
6
24
B
Disturbance
observer filter
10–2500
0.01 ms
Set up the filter time constant according to the disturbance torque
compensation.
*1) For parameter attribute, refer to Section 9-1.
(4) How to use
1)
With Pr 6.10 (Function enhancement setup), set observer enable/disable and operation mode (always
enable/enable only when 1st gain is selected).
2)
Setup of Pr 6.24 (Disturbance observer filter)
First, set up Pr 6.24 to a larger value and check the operation with Pr 6.23 (Disturbance torque compensating
gain) set to a low value, and then gradually decrease the setup value of Pr 6.24. A low filter setup value assures
disturbance torque estimation with small delay and effectively suppresses effects of disturbance. However, this
results in larger operation noise. Well balanced setup is required.
3)
Setup of Pr 6.23 (Disturbance torque compensating gain)
After setting up Pr 6.24, increase Pr 6.23.
The disturbance suppressing capability increases by increasing the gain, but it is associated with increasing
volume of operation noise.
This means that well balanced setup can be obtained by adjusting Pr6.24 and Pr6.23.
R1.00
Motor Business Unit, Panasonic Corporation







































































