


























No. SX-DSV02829 -
115-
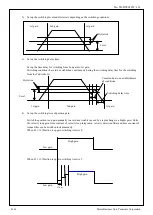
5-2-11 Friction torque compensation
To reduce effect of friction represented by mechanical system, 2 types of friction torque compensation can be applied:
offset load compensation that cancels constant offset torque and the dynamic friction compensation that varies
direction as the operating direction varies.
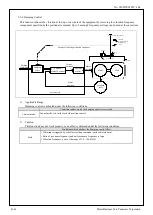
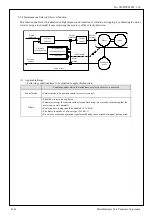
(1) Applicable Range
□ This function can be applicable only when the following conditions are satisfied.
Conditions under which the Friction torque compensation is activated
Control mode
• Specific to individual functions. Refer to “Parameters” shown below.
Others
• Should be in servo-on condition
• Parameters except for controls such as torque limit setup, are correctly set, assuring that the
motor can operate normally.
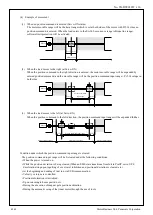
(2) Parameters
Combine the following 3 parameters to setup appropriate friction torque compensation.
Class
No.
At-
trib-
ute *1)
Title
Range
Unit
Function
6
07
B
Torque
command
additional value
-100–100
%
Set up the offset load compensation value usually added to the
torque command in a control mode except for the torque control
mode.
6
08
B
Positive
direction torque
compensation
value
-100–100
%
Set up the dynamic friction compensation value to be added to the
torque command when forward positional command is fed at the
time of position control.
6
09
B
Negative
direction torque
compensation
value
-100–100
%
Set up the dynamic friction compensation value to be added to the
torque command when negative direction positional command is fed
at the time of position control.
*1) For parameter attribute, refer to Section 9-1.
Note) The positive direction of feedback scale (after reversal of direction of Pr3.26 "Feedback scale &
CS reversal") always serves as positive.
R1.00
Motor Business Unit, Panasonic Corporation







































































