




























No. SX-DSV02829 -
166-
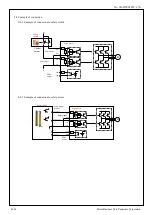
8-2 Specifications of Input & output signals
8-2-1 Safety input/ signal
• Provided with 2 safety input channels to activate the STO function.
Type
Signal
Symbol
Pin No
Contents
Control mode
Position Velocity Torque
Input
Safety input 1
SF1+
X3-4 • Input 1 that triggers STO function. This input turns off
the upper arm drive signal of power transistor.
• When using the function, connect this pin in a way so
that the photocoupler of this input circuit turns off to
activate STO function.
SF1-
X3-3
Safety input 2
SF2+
X3-6 • Input 2 that triggers STO function. This input turns off
the lower arm drive signal of power transistor.
• When using the function, connect this pin in a way so
that the photocoupler of this input circuit turns off to
activate STO function.
SF2-
X3-5
Safety input 1 or 2 enables STO to operate within 5 ms, causing motor output torque to turn off.
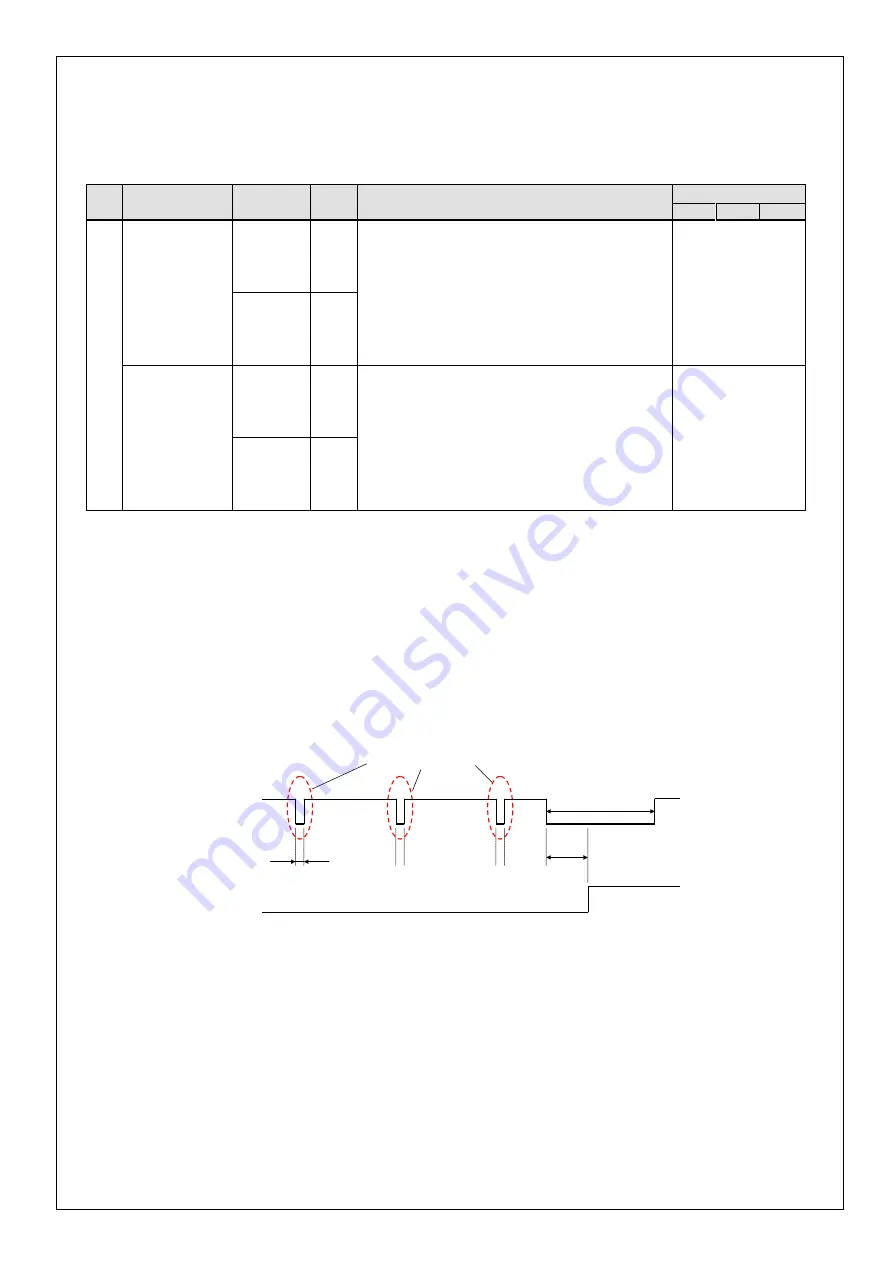
Caution: Safety equipment self-diagnosis L pulse
Safety output signal from the safety controller and safety sensor may include L pulse for self-diagnosis. To prevent the
L pulse from mis-triggering STO function, the safety input circuit has built-in filter that removes the self-diagnosis L
pulse.
Therefore, if the off period of safety input signal less than 1 ms, the safety input circuit does not detect this “off”
event.
To validate this “off” period, turn off the input signal for more than 5 ms.
L pulse for self-diagnosis
1
ms or shorter
5 ms or shorter
Usual operation
STO state
Safety input
signal
Servo driver
operation
5 ms or more
R1.00
Motor Business Unit, Panasonic Corporation






































































