



























No. SX-DSV02829 -
76-
Class
No.
At-
trib-
ute *1)
Title
Range
Unit
Function
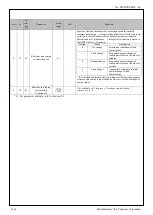
6
32
B
Real time auto
tuning custom
setup
(Continued)
-32768–32767
—
Bit
Content
Description
7
Stiffness
Setup
*5
Enable/disable the basic gain setup to
be made according to Pr0.03
(Real-time auto-tuning machine
stiffness setup).
Setup value=0: Disable
Setup value=1: Enable
8
Fixed
parameter
setup
*5
Enable/disable the change of
parameter that is normally set at a
fixed value.
Setup value=0: Use current setup
Setup value=1: Set to a fixed value.
10–9
Gain
switching
setup
*5
Select the gain switching related
parameter to be used when the real
time auto tuning is enabled.
Setup value=0: Use current setup
Setup value=1: Disable gain switching.
Setup value=2: Enable gain switching.
*3 If the inertia ratio update is enabled, set bit 1–0 to 1(enable). If
neither is effective, the mass ratio is not updated.
*4 If the torque compensation is abled (setup value=2-5), set bit
3–2(Inertia ratio update) to 1(enable). If neither is effective, the
inertia ratio is not updated. The torque compensation alone cannot be
updated.
*5 Set bit3–2(Inertia ratio update) to 1(enable) when this setting is set
excluding 0. At this time, you can be set whether to inertia ratio
update to be effective with bit 1-0(Load characteristics estimation).
Caution) This parameter should be setup bit by bit. Because the
operation is not guaranteed when the setting is wrong, use of the setup
support software is recommended for parameter editing.
Caution) Do not change while the motor is operating. With this
parameter is updated, when the motor stopped after the result of load
characteristic measurement secured.
<Setup procedure of bitwise parameter>
When setting parameter to a value other than 0, calculate the setup
value of Pr 6.32 in the following procedure.
1) Identify the LSB of the setup.
Example: LSB of the torque compensation function is 4.
2) Multiply the setup value by power of 2 (LSB).
Example: To set the torq torque ue compensation function to friction
compensation (middle):
2
4
×
4 = 64.
3) Perform steps 1) and 2) for every setup, sum up the values which
are to be Pr 6.32 setup value.
Example: Load characteristics measurement = enable, inertia ratio
update = enable, torque compensation = friction compensation
(middle), stiffness setup = enable, fixed parameter = set to a fixed
value, gain switching setup = enable, then,
2
0
×
1+2
2
×
1+2
4
×
4+2
7
×
1+2
8
×
1+2
9
×
2 = 1477
*1) For parameter attribute, refer to Section 9-1.
R1.00
Motor Business Unit, Panasonic Corporation







































































