



























-
43
-
-
42
-
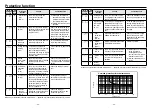
Parameter
Parameter
No.
(Pr
□□
)
Name of parameter
Effective
after
power
resetting
Setting
range
Default
Description
37
Gain switching time
0 to 10000 50
When the gain switching mode is set to auto-
matic switching, after the output of instruc-
tion, the 2nd gain (in running) changes to the
1st gain (in standstill) when time setting has
elapsed. Setting unit [ms]
38
In-position range
0 to 16383 20
In-position signal is turned on when position
error (difference between command position
and actual position) is below setting.
Setting unit [pulse]
39
Position error set-up
0 to 16383 144
Position error occurs when the value of
position error (difference between command
position and actual position) is larger than
this parameter × 8 as well as parameter 3A
is effective. Setting unit [pulse]
3A
Position error
invalidation
0, 1
0
0: Effective
1: Ineffective (Motor does not trip but keeps
on operating.)
3E
Run-command
selection
○
0, 1
0
You can select the run-command method
with this parameter.
0: Command through I/O
1: Command through RS485 (Command
through I/O will be disabled except trip
and
sensor input)
40
Homing mode
0 to 5
0
Select homing method.
0: Home sensor homing 1
1: Home sensor homing 2
2: Limit sensor homing
3: Bumping homing
4: Home resetting
5: Home sensor homing 3
41
Homing direction
0, 1
0
You can set the detection direction of home.
0: Detecting in + direction
1: Detecting in − direction
42
Homing speed
0 to 4000 200 You can set the speed in homing action.
Setting unit [r/min]
43
Homing limit
0 to 16383 0
When the home cannot be detected although
the motor travel distance has exceeded set-
ting, homing error is found. (Ineffective at 0)
Setting unit [rotation number]
44
Homing acceleration/
deceleration time
1 to 30000 200 You can set time taken for reaching the hom-
ing speed. Setting unit [ms]
45
Bumping torque
detection value
50 to 150 50
You can limit the output torque of motor when
returning to bumping home. You can set it in
[%] with reference to the rated torque.
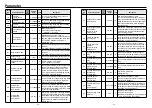
Parameter
No.
(Pr
□□
)
Name of parameter
Effective
after
power
resetting
Setting
range
Default
Description
46
Bumping detection
time
0 to 15000 100
You can set the detection time of bumping
toque in returning to bumping home.
Setting unit [ms]
47
Home offset
–16384 to
16383
0
You can set the offset from home detection
position. When the home has been detected,
set a value of plus and minus opposite to the
desired travel direction as an offset. (When
you set –100, the position traveling 100 puls-
es in +direction on the coordinate system is
set as an home.)
Setting unit [pulse]
48
Homing function
○
0 to 2
1
0: Required
1: Not required (Position when power is
turned on is the home.)
2: When homing is not completed yet, hom-
ing operation is executed by positioning
start signal.
49
Homing selection
when motor is free
0, 1
0
0: When homing is unavailable after motor-
free state is reset (when trip occurs, after
trip is reset), positioning operation is
enabled.
1: When motor is free (trip occurs), homing
is required again.
Note) When Pr48 is 1, setting of this param-
eter is ineffective.
4A
Present position
overflow permission
0, 1
0
You can set operation when the present
position counter of motor has overflowed
(exceeded ±32767 rotations).
0: Prohibited (motor trip)
1: Permitted (no motor trip)
Set it to 1 for operation to allow the motor to
rotate in one direction without change.
4b
Jog speed
0 to 4000 100 You can set the operation speed in jog op-
eration. Setting unit [r/min]
4C
Jog acceleration time
1 to 30000 200 You can set time taken for reaching jog
speed. Setting unit [ms]
4d
Jog deceleration time
1 to 30000 200 You can set time taken from jog speed until
stopping. Setting unit [ms]
4E
Teaching speed
0 to 4000 50
You can set speed used in applying teaching
function of Digital key pad. Acceleration and
deceleration time is the same as jog opera-
tion. Setting unit [r/min]







































































