





























Appendix B: BASIC Stamp and Carrier Board Components and Features
· Page 307
The BASIC Stamp
®
HomeWork Board
™
Project Platform
The BASIC Stamp
®
HomeWork Board
™
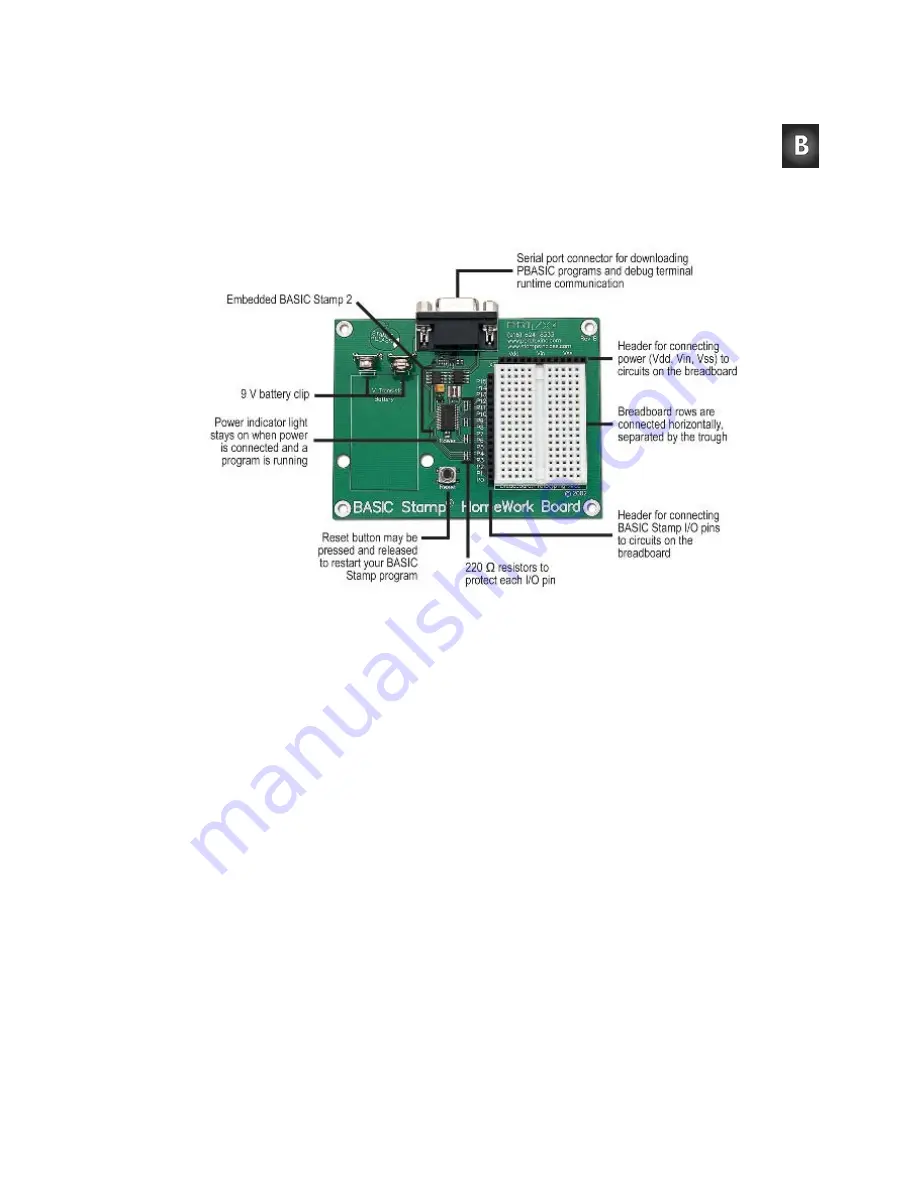
project platform is shown in Figure B-3. Its
major components and their functions are indicated by labels.
Figure B-3:
BASIC Stamp
®
HomeWork Board
™
Project Platform







































































