




















Technical
Characteristics
Multi-axis devices
46
192-120148N5 June 2011
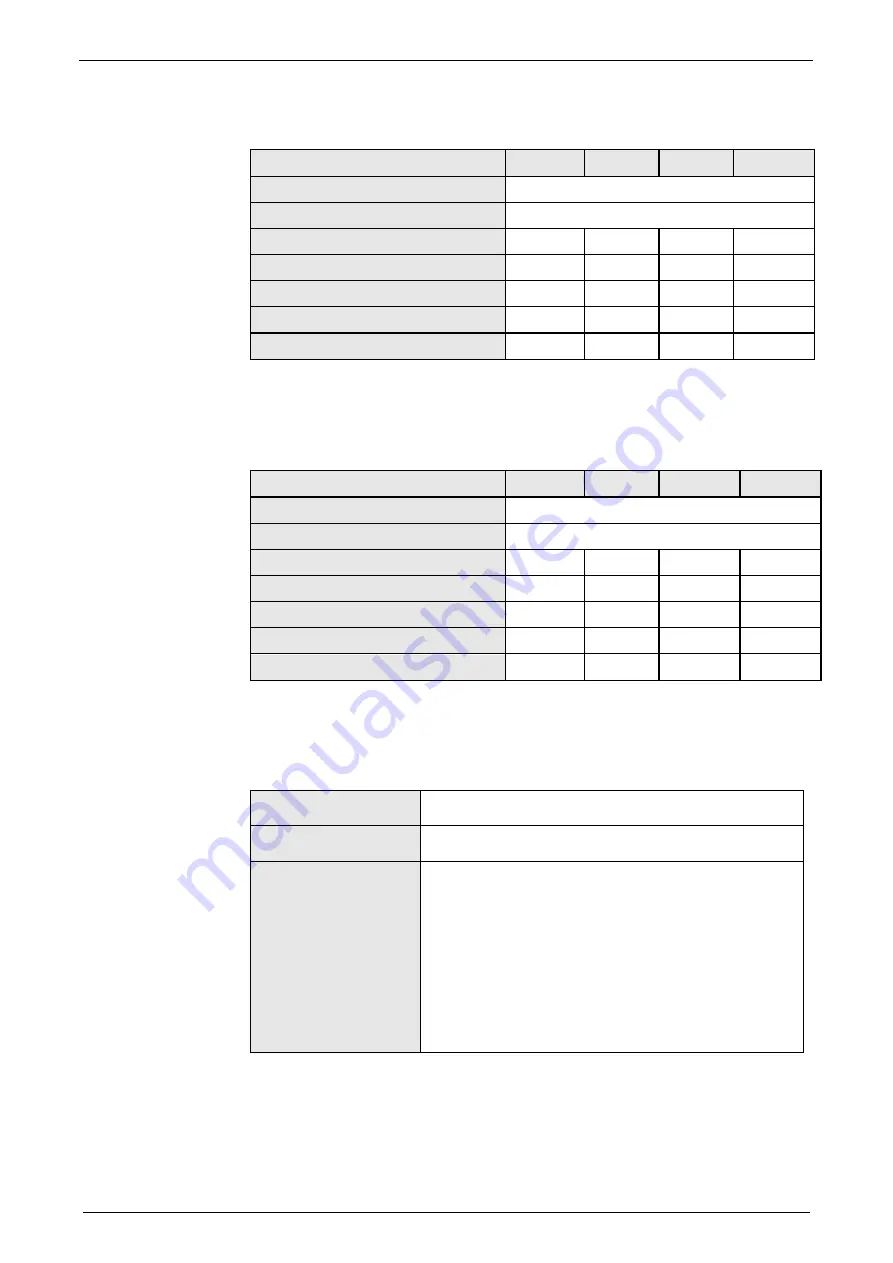
Output data Compax3Mxxx at 3*400VAC
Device type Compax3
M050D6
M100D6
M150D6
M300D6
Input voltage
565VDC ±10%
Output voltage
3x 0-400V (0...500Hz)
Nominal output current
5Arms
10Arms
15Arms
30Arms
Pulse current for 5s*
10Arms
20Arms
30Arms
60Arms
Power
3.33kVA
6.66kVA
10kVA
20kVA
Switching frequency
8kHz
8kHz
8kHz
8kHz
Power loss for In
70W+**
90W+**
120W+** 270W+**
*Electrical turning frequency for pulse current: f>5 Hz; with an electrical turning frequency of f<5 Hz, the
maximum pulse current time is 100ms
** Maximum additional losses with option card 5 W.
Output data Compax3Mxxx at 3*480VAC
Device type Compax3
M050D6
M100D6
M150D6
M300D6
Input voltage
680VDC ±10%
Output voltage
3x 0-480V (0...500Hz)
Nominal output current
4Arms
8Arms
12.5Arms
25Arms
Pulse current for 5s*
8Arms
16Arms
25Arms
50Arms
Power
3.33kVA
6.66kVA
10kVA
20kVA
Switching frequency
8kHz
8kHz
8kHz
8kHz
Power loss for In
70W+**
90W+**
120W+**
270W+**
*Electrical turning frequency for pulse current: f>5 Hz; with an electrical turning frequency of f<5 Hz, the
maximum pulse current time is 100ms
** Maximum additional losses with option card 5 W.
Resolution of the motor position
For option F10: Resolver
Position resolution: 16 Bits (= 0.005°)
Absolute accuracy: ±0.167°
For option F11: SinCos
©
Position resolution: 13.5 Bits / Encoder sine period
=> 0.03107°/encoder resolution
For option F12:
Maximum position resolution
Linear: 24 Bits per motor magnet spacing
Rotary: 24 Bits per motor revolution
Resolution for Sine-Cosine encoders (e.g. EnDat) with
1Vss signal):
13.5 bits / graduation of the scale of the encoder
For RS 422 encoders: 4x encoder resolution
Accuracy of the feedback zero pulse acquisition =
accuracy of the feedback resolution.
Resolution for analog hall sensors with 1Vss signal:
13.5 Bits / motor magnet spacing
Accuracy
The exactitude of the position signal is above all determined by the exactitude of
the feedback system used.







































































