




























INSTALLATION • OEM650/OEM650X
8
Motor Size
Current
Resistor
Voltage
OEM57-40-MOS
2.65A
21.0 k
Ω
48 - 75VDC
OEM57-40-MOP
5.3A
5.76 k
Ω
24 - 48VDC
OEM57-51-MOS
3.3A
15.8 k
Ω
48 - 75VDC
OEM57-51-MOP
6.6A
2.05 k
Ω
24 - 48VDC
OEM57-83-MOS
3.8A
12.7 k
Ω
48 - 75VDC
OEM57-83-MOP
7.5A
0.00 k
Ω
24 - 48VDC
OEM83-62-MO*
4.4A
9.53 k
Ω
24 - 75VDC
OEM83-93-MO*
5.6A
4.87 k
Ω
24 - 75VDC
OEM83-135-MO*
6.9A
1.27 k
Ω
24 - 75VDC
S: Series Configuration P: Parallel Configuration
*34 size motors are internally wired in parallel
Table 2-7. OEM Drive Motor Current (Compumotor Motors)
If you use a
non-Compumotor motor
, carefully follow the motor
manufacturer's instructions regarding motor wiring and the
proper operating current. Compumotor recommends a motor
inductance of 2 mH measured in series or parallel (0.5 mH - 10
mH is acceptable). Table 2-8 shows resistor values that you must
use to properly set motor current when using the
OEM650/
OEM650X
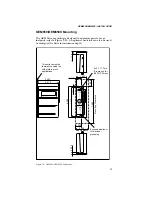
with a non-Compumotor motor. When the
motor
current range
jumper
(jumper 1—see Figure 2-1) is installed, the
drive can generate 2.5 to 7.5 amps. When jumper 1 is removed,
the drive can generate 0.83 to 2.5 amps. If you use the
OEM350/
OEM350X
, use Table 2-9 for resistor and current values to use
with high-inductance (10 mH to 80 mH), low current motors.
Jumper #1 Installed
Jumper #1 Removed
Current Resistance
Current Resistance
Current Resistance
(Amps)
(Ohms)
(Amps)
(Ohms)
(Amps)
(Ohms)
7.5
0
Ω
4.9
7.32 k
Ω
2.5
0
Ω
7.4
205
Ω
4.8
7.68 k
Ω
2.4
619
Ω
7.3
412
Ω
4.7
8.06 k
Ω
2.3
1.27 k
Ω
7.2
619
Ω
4.6
8.45 k
Ω
2.2
2.05 k
Ω
7.1
825
Ω
4.5
8.87 k
Ω
2.1
2.80 k
Ω
7.0
1.02 k
Ω
4.4
9.53 k
Ω
2.0
3.57 k
Ω
6.9
1.27 k
Ω
4.3
10.0 k
Ω
1.9
4.53 k
Ω
6.8
1.54 k
Ω
4.2
10.5 k
Ω
1.8
5.49 k
Ω
6.7
1.78 k
Ω
4.1
10.0 k
Ω
1.7
6.49 k
Ω
6.6
2.05 k
Ω
4.0
11.5 k
Ω
1.6
7.68 k
Ω
6.5
2.26 k
Ω
3.9
12.1 k
Ω
1.5
8.87 k
Ω
6.4
2.55 k
Ω
3.8
12.7 k
Ω
1.4
10.5 k
Ω
6.3
2.80 k
Ω
3.7
13.3 k
Ω
1.3
12.1 k
Ω
6.2
3.09 k
Ω
3.6
13.7 k
Ω
1.2
13.7 k
Ω
6.1
3.32 k
Ω
3.5
14.3 k
Ω
1.1
15.8 k
Ω
6.0
3.57 k
Ω
3.4
15.0 k
Ω
1.0
18.2 k
Ω
5.9
3.92 k
Ω
3.3
15.8 k
Ω
0.9
20.5 k
Ω
5.8
4.22 k
Ω
3.2
16.5 k
Ω
0.83
22.6 k
Ω
5.7
4.53 k
Ω
3.1
17.4 k
Ω
5.6
4.87 k
Ω
3.0
18.2 k
Ω
5.5
5.11 k
Ω
2.9
19.1 k
Ω
5.4
5.49 k
Ω
2.8
20.0 k
Ω
5.3
5.76 k
Ω
2.7
20.5 k
Ω
5.2
6.19 k
Ω
2.6
21.5 k
Ω
5.1
6.49 k
Ω
2.5
22.6 k
Ω
5.0
6.81 k
Ω
Table 2-8.
OEM650/650X
Resistor Selection for Motor Current







































































