




























INSTALLATION • OEM650/OEM650X
20
Resolution
JU2
JU3
JU4
JU5
50,800 Steps/Rev
on
on
on
off
50,000 Steps/Rev
on
on
off
on
36,000 Steps/Rev
on
on
off
off
25,600 Steps/Rev
on
off
on
on
25,400 Steps/Rev
on
off
on
off
25,000 Steps/Rev *
on
on
on
on
21,600 Steps/Rev
on
off
off
on
20,000 Steps/Rev
on
off
off
off
18,000 Steps/Rev
off
on
on
on
12,800 Steps/Rev
off
on
on
off
10,000 Steps/Rev
off
on
off
on
5,000 Steps/Rev
off
on
off
off
2,000 Steps/Rev
off
off
on
on
1,000 Steps/Rev
off
off
on
off
400 Steps/Rev
off
off
off
on
200 Steps/Rev
off
off
off
off
* Default Setting
Table 2-10. Motor Resolution Jumper Settings
Your indexer (if you are using an OEM650) and drive should be set to
the same resolution. If the drive and indexer’s motor resolution
settings do not match, commanded accelerations and velocities will
not be performed accurately.
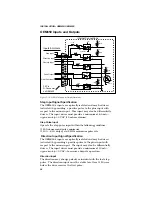
Jumpers #6 - #8: Motor Waveform Shape
These jumpers control the shape or waveform of the commanded
motor current. Motor waveforms can reduce resonance problems
and allow the motor to run smoothly. This function will not operate
when the 200-step or 400-step motor resolutions are used.
Motor Waveform
JU6
JU7
JU8
Pure sine
off
off
on
-2% 3rd Harmonic
off
on
off
-4% 3rd Harmonic*
on
on
on
-4% 3rd Harmonic
off
off
off
-4% 3rd Harmonic
off
on
on
-6% 3rd Harmonic
on
off
off
-8% 3rd Harmonic
on
off
on
-10% 3rd Harmonic
on
on
off
* Default Setting
Table 2-11. Motor Waveform Jumper Settings
Jumpers #9 - #10: Auto Standby
The Automatic Standby function allows the motor to cool when it is
not moving. This function reduces the current to the motor when
the drive does not receive a step pulse for one second. Full current
is restored upon the first step pulse that the drive receives.
Do not
use this function in systems that use an indexer and an encoder for
position maintenance
.
If used in this environment, the system will go
in and out of the Auto Standby mode
.






































































