



























INSTALLATION • OEM650/OEM650X
26
Gear Shift Input
The Gear shift input is an optically isolated input that uses and ILQ2
quad OPTO isolator. The GS+ terminal is connected to the anode of
the OPTO lead via a 681
Ω
current limiting resistor. The GS- terminal
is connected to the cathode of the OPTO lead. The OPTO requires a
minimum of 3.5 mA (approximately 3.5VDC) to ensure proper system
operation.
This function allows a user with a limited frequency generator to
achieve higher velocities while using high resolution settings. This is
accomplished by the drive multiplying each step pulse that it re-
ceives by a factor of 8. This function may be invoked
on-the-fly
;
however, to prevent stalling and to keep track of motor position, it
should only be invoked when the motor is not moving.
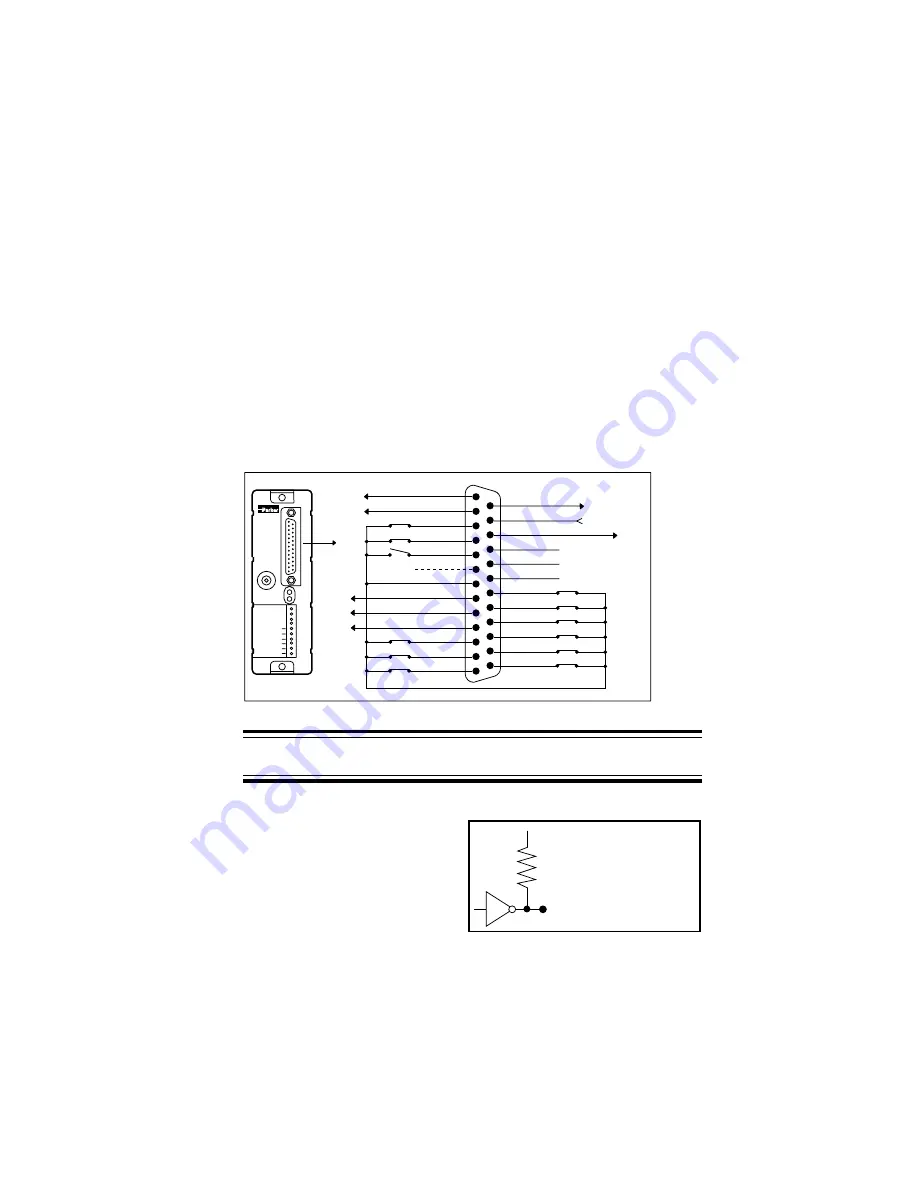
OEM650X Inputs and Outputs
OEM
s
e
r
i
e
s
REMOTE
REF
CURRENT
DUMP
VDC+
VDC-
A+
A-
B+
B-
POWER
FAULT
7
17
16
Tx
Rx
1
2
3
4
5
6
8
9
10
11
12
13
14
15
19
18
21
20
23
22
25
24
N.C.
N.C.
N.O.
N.C.
N.C.
N.C.
CW Limit
Step Output
Direction Output
CCW Limit
Home
Reserved
GND Ref.
Output #2
Fault Output
Output #1
Sequence #1
Sequence #2
Sequence #3
Shutdown
Encoder Channel A
Encoder Channel B
Encoder Channel Z
N.C.
N.C.
N.C.
Trigger Input #1
Trigger Input #2
Trigger Input #3
N.C.
N.C.
N.C.
Address Sel. #1
Address Sel. #2
Address Sel. #3
RS-232C
Slave
Drive
Slave
Drive
Customer
Equipment
Figure 2-19. OEM650X Inputs & Output Schematic
CAUTION
I/O is not OPTO isolated, I/O GND is common to VDC-.
Step (Signal 1) & Direction (Signal 2) Outputs
The OEM650X produces a step
and direction output that is
identical to the indexer's internal
step and direction signals.
These outputs can be used to
slave to another drive or to
monitor the OEM650X's position
and velocity. The Direction
output's default state is logic high. The Step output's default state is
a high, pulsing low output. The figure represents a typical configu-
ration of this output.
• Minimum high-level output: 4.26V
(Source 24mA)
• Maximum low-level output: 0.44V
(Sinks 12 mA)
ACTØ4
+5V
4.75k







































































