





























OEM650/OEM650X • TUNING & SPECIFICATIONS
33
3 Tuning & Specifications
Chapter Objectives
The information in this chapter will enable you to:
❏
Tune and operate your system at maximum efficiency.
❏
Use the information to compare system performance with different
motor, power, and wiring configurations (speed/torque curves).
Short-Circuit Protection
The OEM Series is protected against phase-to-phase and phase-to-
ground short circuits. The drive is designed to withstand short
circuits during initial power up. Short circuits that occur while the
motor is operating may damage the drive. Never short circuit the
motor leads for motor braking.
Resonance
Resonance exists in all stepper motors and is a function of the
motor’s mechanical construction. It can cause the motor to stall at
low speeds. Most full step motor controllers
jump
the motor to a set
minimum starting speed that is greater than the resonance region.
The OEM650X’s microstepping capability allows you to operate a
motor smoothly at low speeds.
Motors that will not accelerate past 1 rps may be stalling due to
resonance. You can add inertia to the motor shaft by putting a drill
chuck on the shaft. The drill chuck may provide enough inertia to
test the motor when it is not loaded. In extreme cases, a viscous
damper may also be needed.
Mid-Range Instability
All step motors are subject to mid-range instability, also referred to
as parametric oscillations. These oscillations may stall the motor at
speeds from 6 to 16 rps.
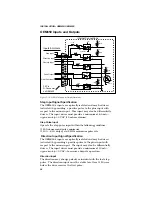
Tuning Procedures
You can tune the OEM650X to minimize resonance and optimize
smoothness by adjusting the small potentiometers (pots) on the top
of the unit. Figure 3-1 shows the location of the potentiometers and
their functions.
❏
Phase A Offset: Adjusts DC offset of the phase current for Phase A.
❏
Phase B Offset: Adjusts DC offset of the phase current or Phase B.
Since tuning is affected by operating current, you may have to adjust
these pots during the configuration or installation process.
For best







































































