






















66
ζ
ZETA6xxx Installation Guide
The level at which the I/O operates means that the signals
are unlikely to meet EMC immunity requirements if taken
outside the enclosure without proper screening.
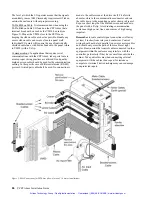
50-Pin Ribbon Cable: It is recommended when using the
50-Pin Ribbon Cable I/O found on the ZETA6xxx that a
terminal break out box such as the VM50 be used (see
Figure 3). Mount the VM50 close to the ZETA6xxx,
keeping the ribbon cable as short as possible. Bundle any
excess ribbon cable and secure close to a panel wall.
Individual I/O points will require the use of individually
shielded cable runs, with braids bonded to the panel (close
to VM50) with a P-clip.
Communications: In applications that require serial
communications with the ZETA6xxx, take special care to
assure proper wiring practices are utilized. Good quality
braided screen cable should be used for the communication
cabling. In the specific case of differential mode (RS-485)
protocol, twisted pair cable shall be used. No connection is
made to the cable screen at the drive itself. Fit a ferrite
absorber close to the communications connector and run
the cable down to the mounting panel as shown in Figure 3.
Expose a short length of the braided screen and anchor to
the panel with a P-clip. Avoid routing communication
cables near high power lines, and sources of high energy
impulses.
Remember to route control signal connections well away
(at least 8 inches) from relays and contactors. Control
wiring should not be laid parallel to power or motor cables
and should only cross the path of these cables at right
angles. Bear in mind that control cables connected to other
equipment within the enclosure may interfere with the
controller, particularly if they have come from outside the
cabinet. Take particular care when connecting external
equipment with the cabinet door open, for instance a
computer or terminal; static discharge may cause damage
to unprotected inputs.
Figure 3. EMC Connections for ZETA6xxx (shown for non C10 motor installations)
Artisan Technology Group - Quality Instrumentation ... Guaranteed | (888) 88-SOURCE | www.artisantg.com







































































