





















14 – Pvd3675_Gb_Ey_Septembre_2017
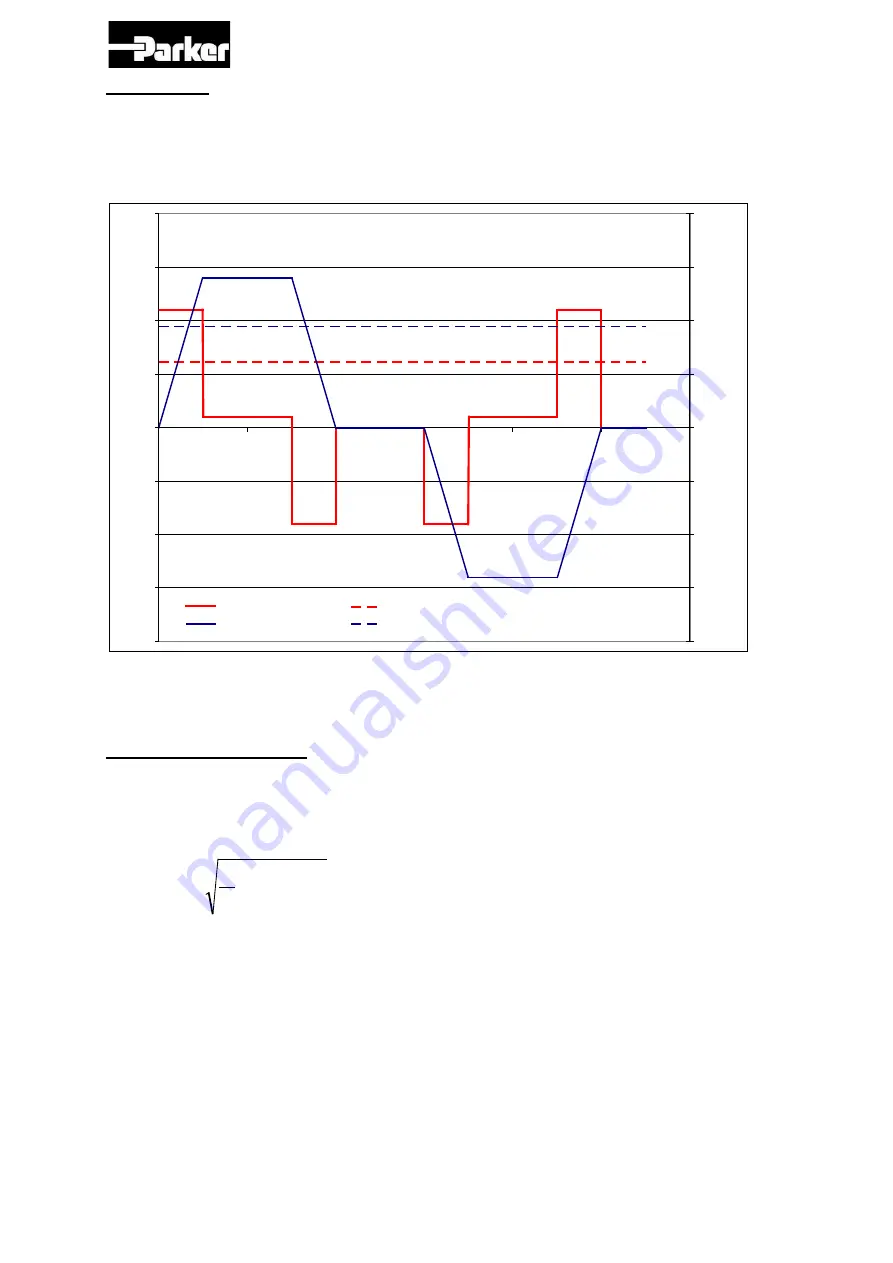
Illustration :
Acceleration-deceleration torque:
10 Nm for 0,1 s.
Resistant torque:
1 Nm during all the movement.
Max-min speed:
±
2800 rpm during 0,2 s.
Max torque provided by the motor:
11 Nm.
rms torque:
6 Nm.
The maximal torque
M
i
delivered by the motor at each segment
i
of movement is
obtained by the algebric sum of the acceleration-deceleration torque and the resistant
torque. Therefore,
M
max
corresponds to the maximal value of
M
i
.
Selection of the motor :
The motor adapted to the duty cycle has to provide the rms torque
M
rms
at the rms speed
(*) without extra heating. This means that the permanent torque
M
n
available at the
average speed presents a sufficient margin regarding the rms torque
M
rms
.
(*) rms speed is calculated thanks to the same formula as that used for the rms torque.
The mean speed cannot be used (in general mean speed is equal to zero).
Only use the rms speed.
-20
-15
-10
-5
0
5
10
15
20
0.0
0.2
0.4
0.6
0.8
1.0
1.2
Time [s]
To
rq
ue
[N
m
]
-4000
-3000
-2000
-1000
0
1000
2000
3000
4000
Sp
ee
d [
rp
m
]
motor torque [Nm]
rms average torque [Nm]
speed [rpm]
rms average speed [rpm]
∑
=
∆
Ω
=
Ω
n
i
i
i
rms
t
T
1
2
*
1
Summary of Contents for EY Series
Page 1: ...1 Pvd3675_Gb_Ey_Septembre_2017 Servomotors EY Series Technical Manual PVD 3675 EY Series...
Page 37: ...37 Pvd3675_Gb_Ey_Septembre_2017 3 3 Outline drawings 3 3 1 EY310E...
Page 38: ...38 Pvd3675_Gb_Ey_Septembre_2017 3 3 2 EY420E EY430E...
Page 39: ...39 Pvd3675_Gb_Ey_Septembre_2017 3 3 3 EY620E EY630E...
Page 40: ...40 Pvd3675_Gb_Ey_Septembre_2017 3 3 4 EY820E EY840E EY860E...
Page 44: ...44 Pvd3675_Gb_Ey_Septembre_2017 3 5 2 2 EY420 3 5 2 3 EY430...
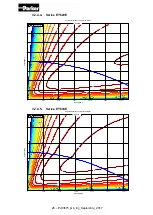
Page 45: ...45 Pvd3675_Gb_Ey_Septembre_2017 3 5 2 4 EY620 3 5 2 5 EY630...
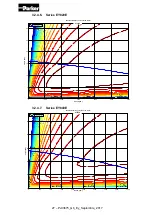
Page 46: ...46 Pvd3675_Gb_Ey_Septembre_2017 3 5 2 6 EY820 3 5 2 7 EY840...
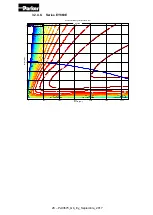
Page 47: ...47 Pvd3675_Gb_Ey_Septembre_2017 3 5 2 8 EY860...







































































