





























189
direction at low speed after reaching the rising edge of the ORGP signal. After reaching the
falling edge of the ORGP signal, the motor changes to run in positive direction at low speed,
and stops at the rising edge of the ORGP signal.
c
)
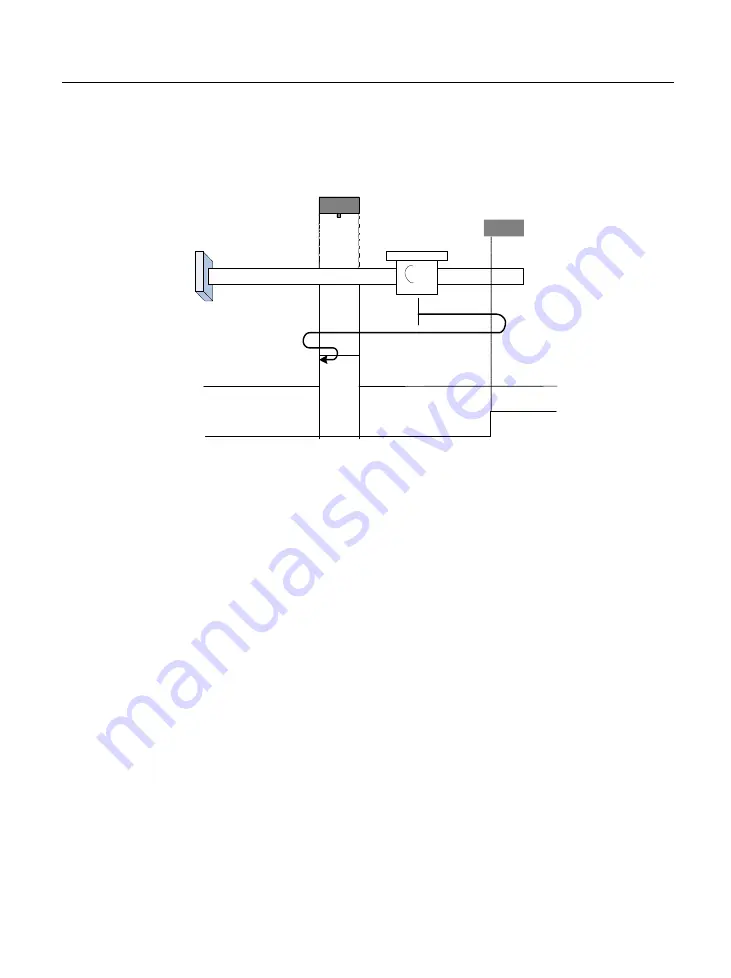
Deceleration point signal inactive at homing start, reaching positive limit switch
H
-H
-L
L
Home switch
Home switch signal
Motion profile
Positive limit switch
Positive limit signal
The ORGP signal is inactive initially, and the motor starts homing in positive direction at high
speed.
If the motor reaches the limit switch, it automatically changes to run in negative direction at
high speed.
After reaching the rising edge of the ORGP signal, the motor decelerates and continues to run in
negative direction at low speed. After reaching the falling edge of the ORGP signal, the motor
changes to run in positive direction at low speed, and stops at the rising edge of the ORGP
signal.
c
)
Deceleration point signal active at homing start







































































