





























219
d
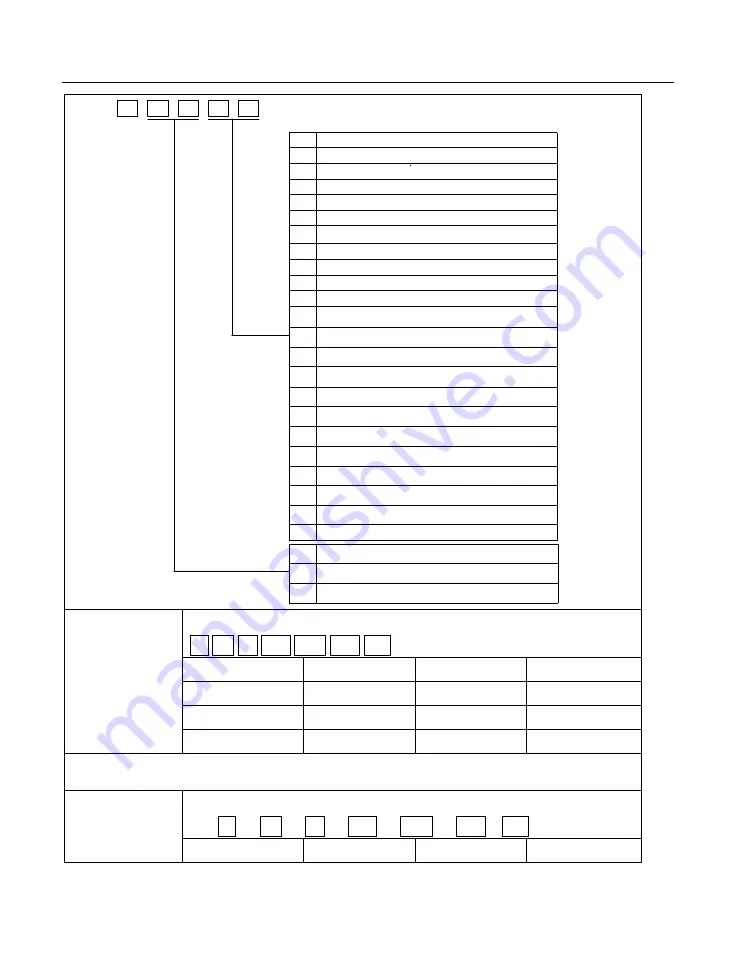
Control mode setting
X
Position pulse mode
Internal register torque mode
1
Internal register speed mode
Reserved
0
4
3
2
5
Internal register position mode
6
7
8
9
10
11
12
13
14
15
16
18
19
20
Mix mode of internal register speed and position pulse
Mix mode of internal register speed and internal register torque
Mix mode of internal register speed and internal register position
Mix mode of internal register torque and position pulse
Mix mode of position pulse and internal register position
17
Mix mode of internal register torque and internal register position
Y
0
1
Clockwise as viewed from servo motor shaft
Counterclockwise as viewed from servo motor shaft
Motor forward direction setting
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
Reserved
21
Bus mode
Sub-index 04h
Encoder frequency-division numbers
PP PV PT CSP CSV CST HM
Setting Range
Setting Unit
Mfr’s Value
Effect
1
~
65535
N/A
—
immediate
Function code
Mapping o
Data type
Accessibility
Po003
N
UINT16
RW
Po003 is used to set frequency-division numbers for each phase.
The entry-into-effect time is 100ms.
Sub-index 06h
Encoder pulse frequency-division numbers denominator
PP PV PT CSP CSV CST HM
Setting Range
Setting Unit
Mfr’s Value
Effect







































































