




























FL20-S Series
294
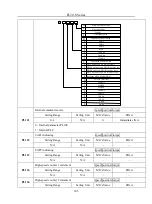
Po501
Communication mode Speed Position Torque
Setting range
Setting unit
Mfr’s value
Effect
0~1
N/A
1
Effective Immediate
Please refer to chapter 10
Po502
Stop bit Speed Position Torque
Setting range
Setting unit
Mfr’s value
Effect
0~1
N/A
0
Effective Immediate
0: 1bit 1: 2 bits
Po503
Parity check selection Speed Position Torque
Setting range
Setting unit
Mfr’s value
Effect
0~2
N/A
0
Effective Immediate
0: No checkout 1: Odd 2: Even
Po504
Baud rate Speed Position Torque
Setting range
Setting unit
Mfr’s value
Effect
0~5
bit/s
3
Effective Immediate
0: 2400 1: 4800 2: 9600 3: 19200 4: 38400 5: 57600
Po505
Permission of Read&Write Speed Position Torque
Setting range
Setting unit
Mfr’s value
Effect
0~1
N/A
1
Effective Immediate
0: Permission of Read &Write, the communication data is allowed to be written into data register.
1: Prohibition of Read&Write, the communication commands are only executed, but they are not allowed
to be written into data register. If the servodrive is power off, data will be lost and they need to be written
again.
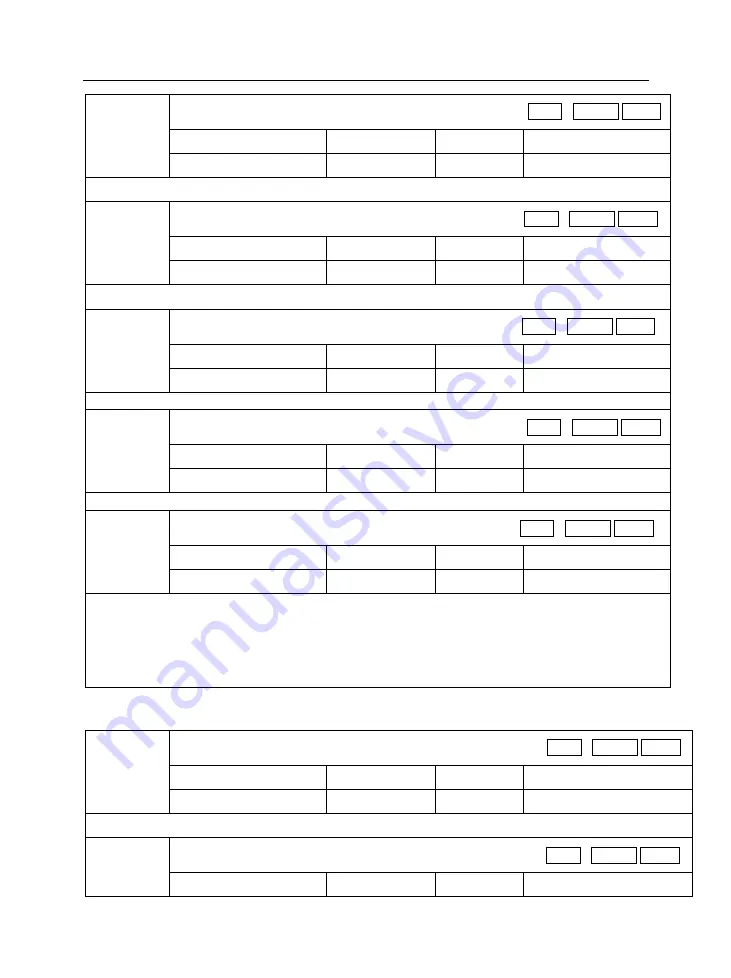
8.1.4 Motor function group
(
Ho-
□□□
)
Ho000
Rated voltage of servo motor Speed Position Torque
Setting range
Setting unit
Mfr’s value
Effect
1~30000
V
—
Effective Immediate
Please set Ho000 according to servo motor nameplate.
Ho001
Rated current of servo motor Speed Position Torque
Setting range
Setting unit
Mfr’s value
Effect
Summary of Contents for FL20-S Series
Page 1: ......
Page 33: ...FL20 S Series 33 M3 structure Fig 3 1 5 Servo drive structure 3 ...
Page 35: ...FL20 S Series 35 M4 structure Approx mass 10 365 kg Fig 3 1 7 Servo drive structure 5 ...
Page 36: ...FL20 S Series 36 M5 structure Approx msaa 11 1Kg Fig 3 1 8 Servo drive structure 6 ...
Page 37: ...FL20 S Series 37 M6 structure Approx mass 17 4Kg Fig 3 1 9 Servo drive structure 7 ...
Page 169: ...FL20 S Series 169 Fig 6 4 44FL20E Cam internal frameworkdiagram ...
Page 347: ...FL20 S Series 347 ...







































































