




























23 - PVD3627-August 2011
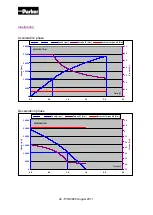
3.1.5.
The drive selection depends on its rated power, nominal current and maximal
electrical frequency able to be managed by the drive and by the flux weakening ratio.
Drive selection
Please refer to the drive technical documentation for any further
information and to select the best motor and drive association.
Short circuit current of the motor must be inferior to the permanent
current of the drive
I
cc_motor
< I
S1_drive
Please refer to the drive technical documentation
Short circuit current of the motor must be inferior to 0.8 times the peak
current of the drive
I
cc_motor
< 0.8 x I
S3_drive
Please refer to the drive technical documentation
Max back emf of the motor must be inferior to the max voltage (from
the motor) supported by the drive
Please refer to the drive technical documentation
Please, check field weakening ratio supported by the drive.
Field weakening ratio = Max speed divided by the basis speed
Due to the maximum electrical frequency able to be managed by the
drive, the motor has a speed limitation given as follows:
Other limitations can come from the bearing type
(steel straight, hybrid or Xlife)
Cf: §3.4 Bearing
(
)
poles
Number_of_
60
*
Hz)
frequency(
Max_drive_
*
2
rpm
limitation
Speed
=







































































