




Parker Hannifin S.p.A S.B.C. Division
SLVDN User’s Manual
Page 115 of 181
10.8.2.
Speed adjustment
In the operating mode default conditions (Pr31=0), the drive adjusts the motor in speed based
on the reference value.
The reference origin can be selected with the main block parameters, between analogue
(external potentiometer), internal (digital), or external pulse string.
It is possible to make comparison by zero speed, and other speeds, set acceleration and
deceleration ramps, change the current and torque limits, and check the drive status.
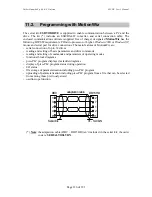
The main block diagram shows the main drive structure, how the configuration parameters act
(bit or Pb parameters) and the main numerical parameters (Pr).
10.8.3.
Current or torque adjustment (typical)
To set the converter to Current mode (torque adjustment), the speed ring is excluded by
setting b42.2=1.
The main analogue reference is assumed as torque reference (current).
If the nominal current value is exceeded, the thermal image trips as in the speed operation.
10.8.4.
Virtual encoder
The virtual encoder function is enabled by setting b42.0 = 1, 42.1 = 0 and 42.5 = 1. A virtual
encoder will be available at the X3 connector and its speed will be as set in Pr3. The set speed
has a resolution equal to 1 rpm and a value in the range –3500 and +3500 rpm. The output
signals (phase A, phase B) will simulate an encoder of Pr44 steps/revolution, without phase C
of 0.
After the programming, the configuration must be saved and the unit must be powered off and
on again.
Not compatible function with operating OPM15