






















Parker Hannifin S.p.A S.B.C. Division
SLVDN User’s Manual
Page 173 of 181
13.1.12.
Drive parameters
Some debug commands and parameters are added concerning CANopen
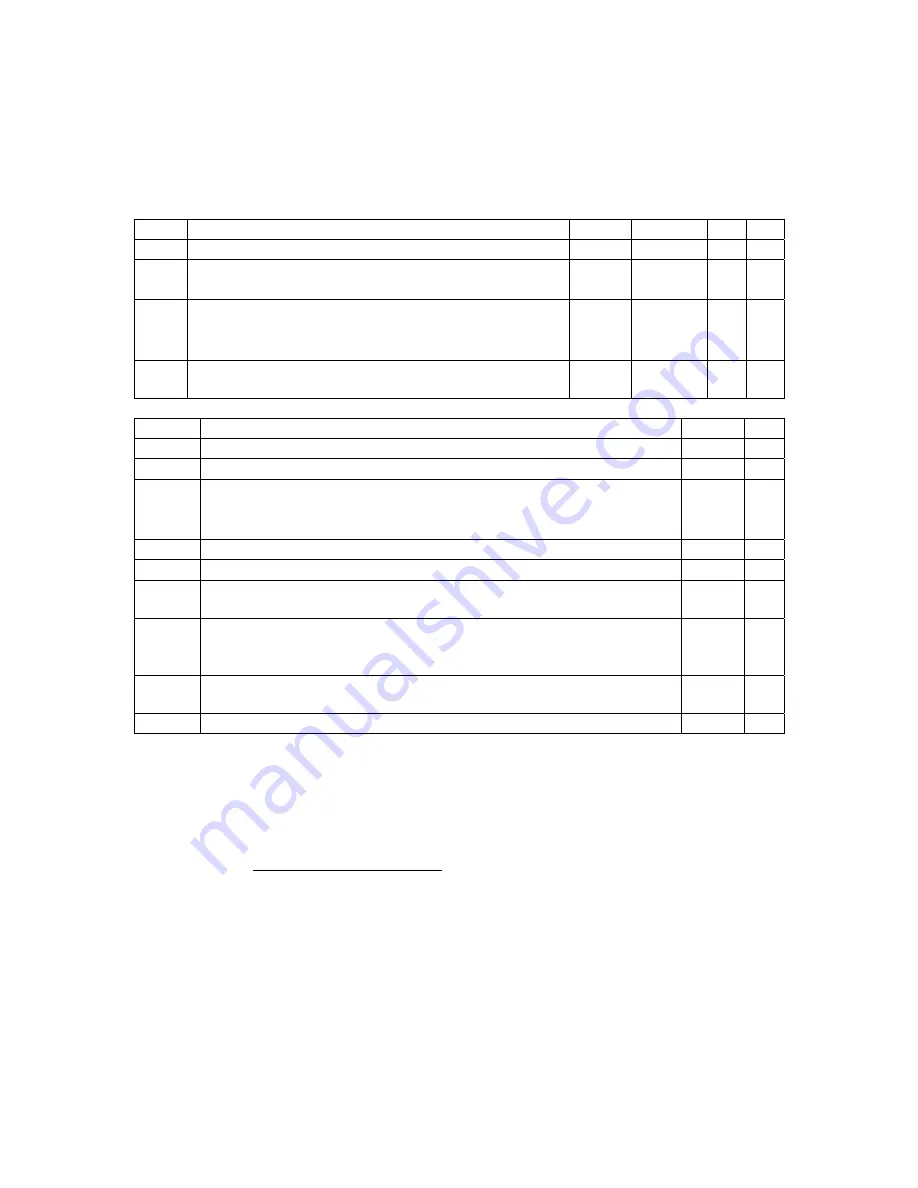
Par. Description Field
Range
Def. Ris.
Pr233 Lifetime factor.
W 0÷10 6 1
Pr273 CANOPEN_CTRL_WORD.
Control of drive status.
R -32768÷
+32767
0 1
Pr274 CANOPEN_STATUS_WORD.
Status of the drive
(If I
2
t current clamping is active bit 11 of the
statusword rises).
R
-32768÷
+32767
0 1
Pr275 CANOPEN_DS301_STATUS.
Status of
communication profile DS301.
R
-32768÷
+32767
0 1
Par. Description Field
Def.
b232.0 Emergency
disabled.
R/W 0
b232.1 Enable SSC Filter.
R/W 1
b232.13
b232.14
b232.15
Axes selection.
R/W 0
b247.7 Feedforward computed from the position reference.
R/W 0
b247.15 Watchdog sync received.
R/W 0
b271.8 Enable sync check.
(1) enables missing sync check dsp 402
CANopen
R/W 1
b272.1 Conversion of velocity.
(1) conversion of velocity and acceleration
in standard units counts/sec e counts/sec
2
(0)) conversion of velocity
and acceleration in rpm and msec/krpm
R/W
1
b272.4
(1) set to every end ramp CANopen, at the delay start of the disable
status
R/W 0
b272.9 Remote
mode.
(1) Remote mode CANopen (0) remote disabled
R/W
1
Note: When in remote mode the bit b40.6, b40.2 and the parameters Pr8, Pr9, Pr10, Pr11,
Pr12 and Pr55 are handled by firmware according to CANopen network setting and
commands and should not be modified by the user.
Note: When in
interpolated position mode
Feed-forward of speed enable in case of sync
frequency is >400Hz, set b247.7=1, b70.6=0 and b70.7=0. Otherwise when the frequency is
<400Hz, set b247.7=0, b70.6=0 and b70.7=0.







































































