



























Parker Hannifin S.p.A S.B.C. Division
SLVDN User’s Manual
Page 54 of 181
The first time the converter is powered up, or following a default command, the drive
indicates a “dEF” condition (alarm Pr23=15).
In order to leave the drive’s initial condition, the operator shall have to input the motor data.
The parameters defining motor types are as follows:
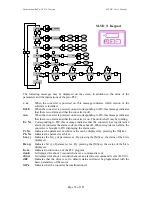
Pr29 Number
of
motor
poles N.
Pr32
Rated speed of the motor
r.p.m.
Pr33
rated motor current (ex. 2.5A, write 2.5)
A
Pr34 number
of
resolver
poles
N.
Pr46
phase-phase motor resistance (ex. 1,8
Ω
, write 1.8)
ohm
Pr47
phase-phase motor inductance (ex. 2.6mH, write 2.6)
mH
With asynchronous motors, the values above shall be supplemented with the following
parameters:
Pr217 = 1
Pr218
base
speed
r.p.m.
Pr219
slip
r.p.m.
Pr220
magnetizing current (*)
A
After setting the parameters that fit the motor, the operator must give the save data command,
b99.15 (deive disabled b41.5=0). The drive will calculate the correct values of Pr2, Pr3, Pr16,
Pr17, Pr18, and Pr19. The automatic calculus is done only if the drive is in default condition
(alarm15).
Attention:
when the opm are selected from the master EtherCAT, the parameters of the position loop
must be set to correct management of the motor:
Pr57
proportional gain of the position loop
Pr50
maximum
speed
and, if is used, the feed forward parameters: Pr106, b70.6 and b70.7.
9.4. Changing motor data
After having entered a data save command, no other changes shall be made to the motor
parameters . In order to change the entered parameter values (new motor), enter command
b94.3
. The drive shall return to its default condition and changing motor data shall be enabled
again. Repeat the data save procedure with command
b99.15
(with drive disabled) if you
want to recalculate parameters Pr2, Pr3, Pr16, Pr17, Pr18 and Pr19 with the new motor data.
9.5. Setting feedback
The drive can use various types of sensor for the control of the speed and current loop.
T
he
choice of the type of drive must be made in phase of order, because there are different
configuration type of the drive.
Solo per motore asincrono







































































