





























Parker Hannifin S.p.A S.B.C. Division
SLVDN User’s Manual
Page 85 of 181
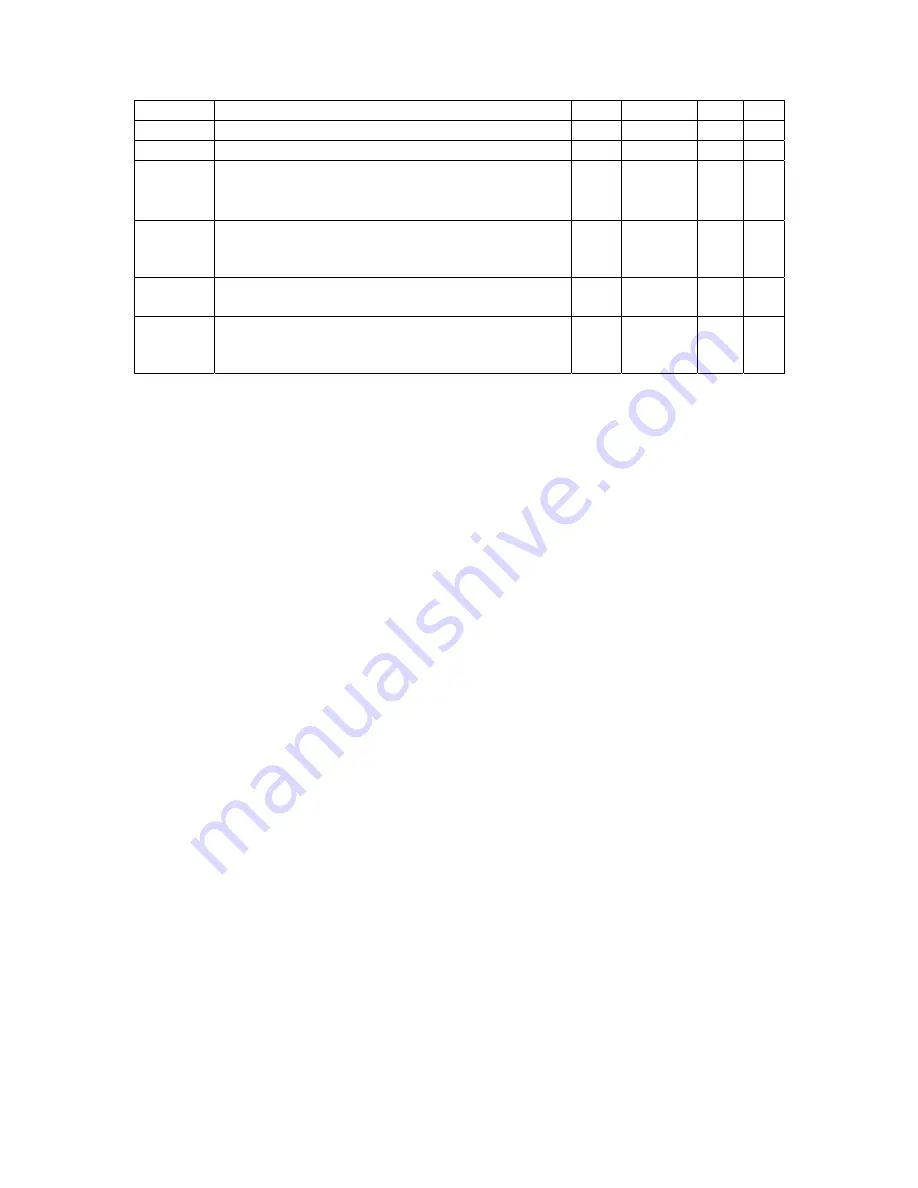
Par. Description
Field
Range
Def. Res.
Pr158
ENCODER CAN pointer (b70.10).
1
Pr159
Speed encoder IN via CAN.
1
Pr212
F/Dir reference multiplier.
Using this parameter
and Pr213, the user can set the ratio desired for the
input reference frequency.
R/W
M
-32000÷
+32000
1
1
Pr213
F/Dir reference divider.
Using this parameter and
Pr212, the user can set the ratio desired for the
input reference frequency.
R/W
M
-32000÷
+32000
1
1
Pr215:214
F/Dir counter
.
R
M
[steps] 1
Pr216
F/Dir rotation speed (read-only)
. Unit = rpm.
Indicates the input reference frequency translated
into rpm (based on 4096 imp/revolution).
R
M
[rpm] 1







































































