





























-17-
Chapter 2 Product Brief Introduction
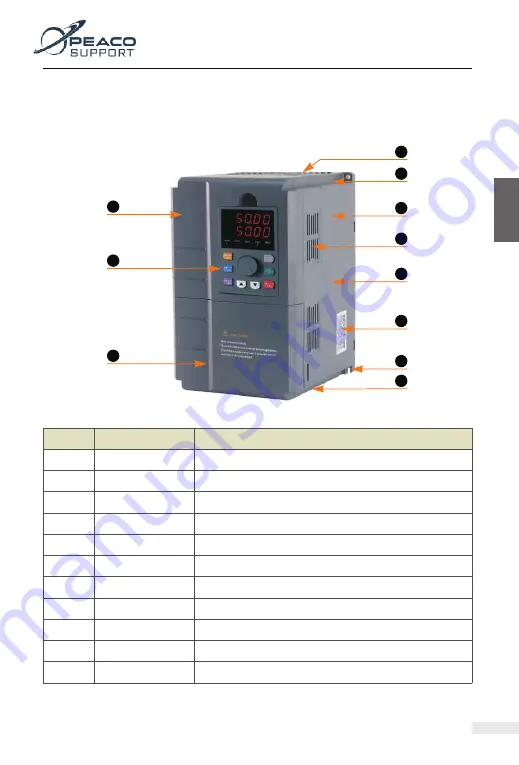
2.5 All components schematic diagram of AC drive
The following picture is all components and names of below 22KW plastic shell
AC drive.
4
5
6
7
8
10
11
9
1
2
3
No.
Name
Description
❶
Cabinet-cover
Protect the internal components.
❷
Keypad
Refer to chapter4 "Keypad operating procedures."
❸
Lower-cover
Protect the internal components.
❹
Fan-cover
Protection fan.
❺
Lower House
Including Fan and
heat sink
❻
Middle House
Including Power Boards
❼
Dust prevention
To Prevent Dust
❽
Bottom Board
Inverter protection
❾
Apron
Convenient input and output wiring.
❿
Series Label
Refer to 2.3 "
Naming Rules
".
⓫
Screw Hole
To make VFD firm with screw
C
h
a
p
te
r
2
Peaco Support FC280 Series VFD User Manual
www.peacosupport.com sales@peacosupport.com Free Shipping Worldwide Reliable Supplier
PEACO SUPPORT







































































