





























AIR10-1420A Operation Manual
Installation of Robot Body
7
4
Installation of Robot Body
4.1
Technological Specifications
The force applied to the ground is shown in Table 4-1 when the manipulator
moves. Enough thought shall be given to the strength of foundation installation
surface for the installation of manipulator. The installation ground inclination
shall be less than 5
°
for manipulator.
Table 4-1 Force in Relation to the Installation Ground
Force
Value
Force (Z) Fv
2071N
Force (XY) Fh
2892N
Torque (XY) Mk
2618Nm
Torque (Z) Mr
1563Nm
Manipulator Mass
160kg
Max. Load
22kg
(
10kg+12kg
)
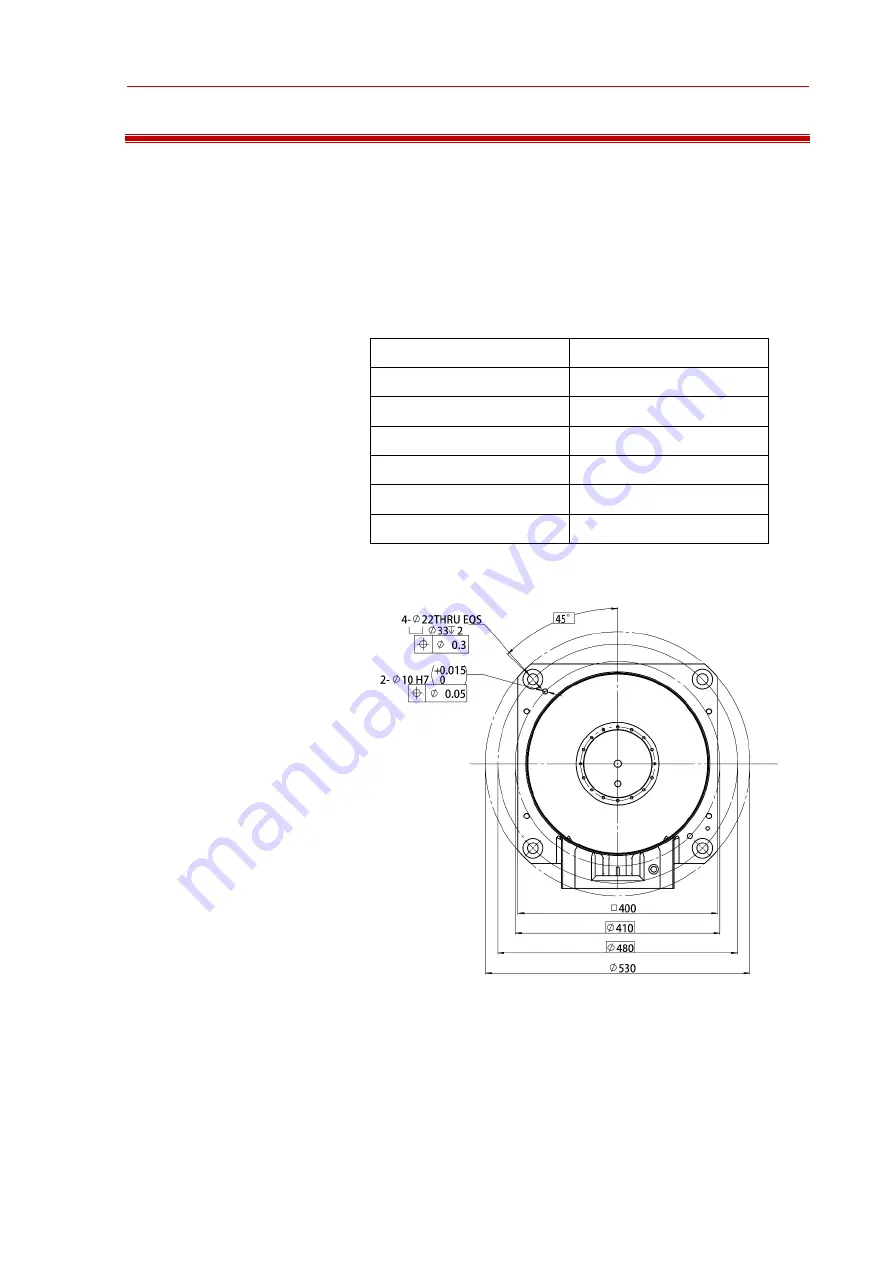
Dimensions of AIR10-1420A manipulator base are shown in Fig. 4-1:
Fig. 4-1 Dimensions of AIR10-1420A Manipulator Base Interface

































































