





























AIR10-1420A Operation Manual
Performance of AIR10-1420A Manipulator
22
9
Performance of AIR10-1420A Manipulator
9.1
Basic Specification
Please see
Chapter 2.3
in this manual for details about the basic specification
of AIR10-1420A robot.
9.2
Range of Robot Body
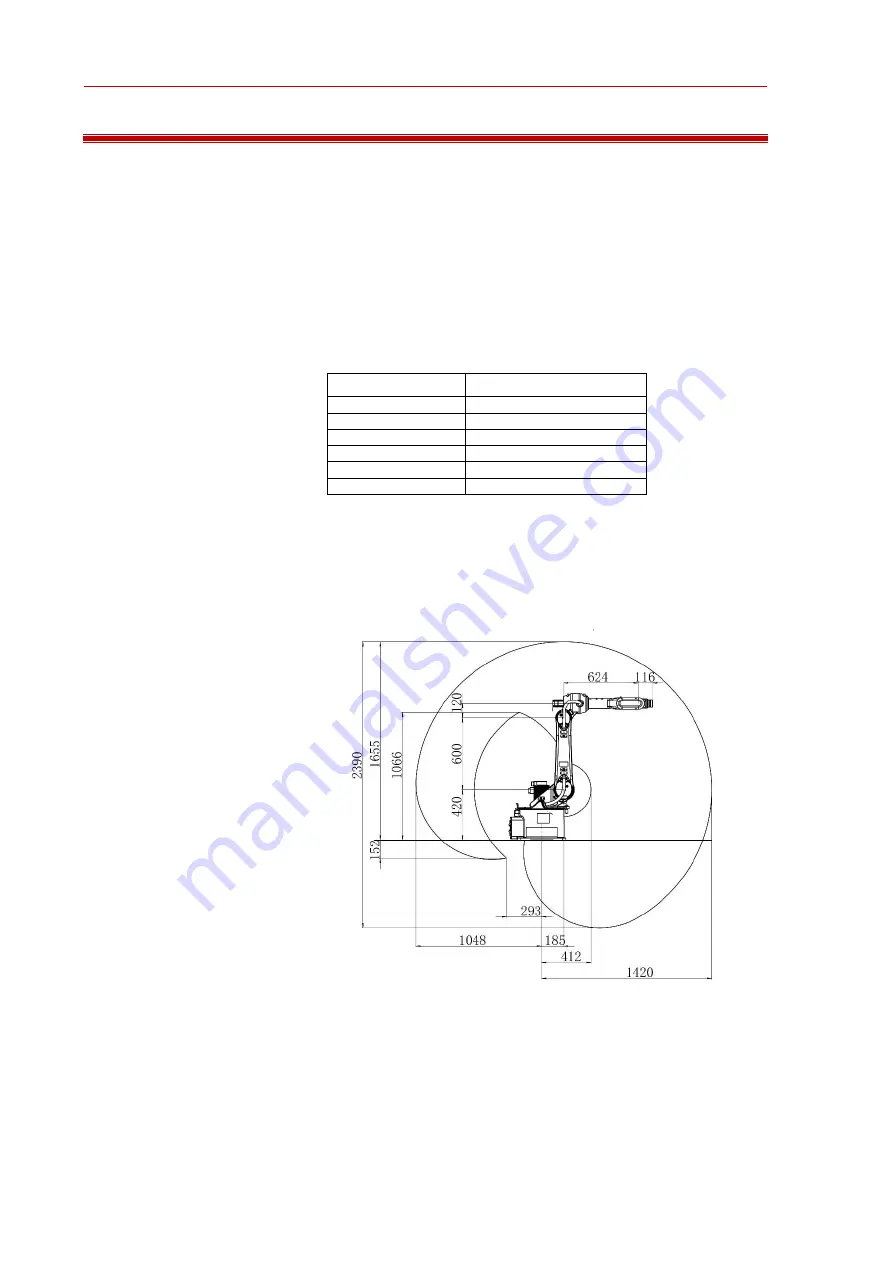
Range of manipulator is as shown in Table 9-1, the working envelope is as
shown in Fig. 9-1.
Table 9-1 Motion Ranges of AIR10-1420A Manipulator Axle
Axle Number
Range
(°)
J1*
-170 ~ +170
J2
-85 ~ +150
J3
-95 ~ +170
J4
-195°
~195°
J5
-135 ~ +135
J6
-360 ~ +360
*
If the mechanical limit of J1 axle is removed, the range may reach -180°
to
180°
.
Care shall be taken when installing peripheral equipment to avoid the
interference with the body and range of robot. Unit: mm.
(a)

































































