





























AIR10-1420A Operation Manual
Performance of AIR10-1420A Manipulator
26
External device which may be installed on manipulator elbow shall be not
more than 12 Kg.
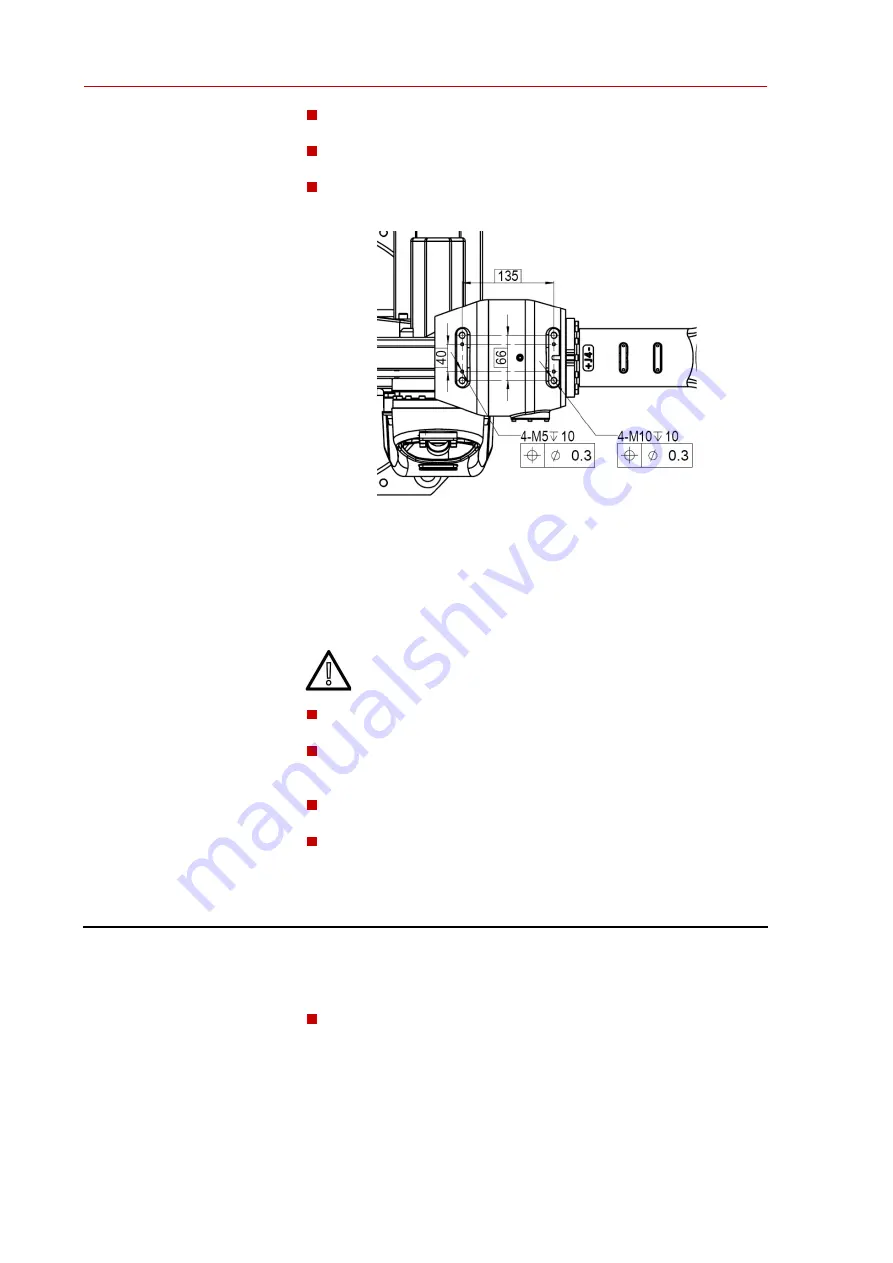
Centroid position of elbow load shall be located inside the area sized
135mmx66mm for installing screw as shown in Fig. 9-5.
Distance between Centroid and installing face shall be not more than 60
mm.
Fig. 9-5 Diagram of AIR10-1420A Manipulator Elbow Load Interface
Reliability shall be considered sufficiently when the external device is installed.
The screw, grade 12.9, is proposed to use according to defined torque. Thread
locker shall be daubed on the thread, otherwise screw may loosen or crack that
may cause accident after long-time running.
Warning
Do not machine holes or thread holes on the manipulator body, otherwise
the safety and function of manipulator may be destroyed.
The depth of screw shall be sufficiently considered during installing
external device. The depth of screw is not more than 10mm, otherwise
manipulator elbow may be hurt.
Elbow load centroid must be not out of the aforesaid value, otherwise
manipulator may not work or may have lower working life.
Care shall be taken when installing peripheral equipment on the elbow to
avoid the interference with the body and cable of robot while broken
cable may lead unpredictable failure.
Other Installing Locations on Manipulator
There are other installing Locations considered to fix cable conveniently on the
manipulator, as follows:
Fixing Location of Manipulator Forearm
Interface specification and size of manipulator forearm is as shown in Fig.




































































