





























Diagnostics
1MAN0158-H11 04-2005 CSIP Level 1
CardioMD Service Manual
5-31
The logging setting is the result of an OR operation on these individual hexadecimal values. For
example, specifying
errlog 0x0180
enables logging of HANDSET and MOTION.
The X, Y, Z logging only applies to the pertinent motion controller:
X – Linear controller
Y – Linear controller
Z – Rotate controller (Z is an alias for the rotate axis).
If you enable CAN, CANOPEN, and CANREPORT, you get a logging of all activity on the
CANbus that can be seen by this motion controller, with the exception of the CANbus messages
generated by the motion controller itself. Only the rotate controller generates CANbus messages.
To see the messages generated by this motion controller to the PC (PDO’s), you must enable
CANPDOS. Alternatively, you can connect the terminal to the linear motion controller and
monitor the traffic on the CANbus from there.
Note
. PDO’s are only sent when the motion controller state is OPERATIONAL, i.e. when the
acquisition PC has established contact. You can check the state by pressing [Ctrl-Q].
Further useful settings:
MOTION
When this mode is enabled, relevant information regarding the motions
controlled by this motion controller are provided, such as motion start and
stop, faults encountered etc. This setting is useful on both controllers. It is the
default setting for the linear motion controller
HANDSET
Displays the hand controller key actions. The setting is only useful for the
rotate motion controller
TRAJECTORY
When this mode is enabled, the different states of the trajectory calculation is
displayed. The setting is only useful on the rotate motion controller (default
setting).
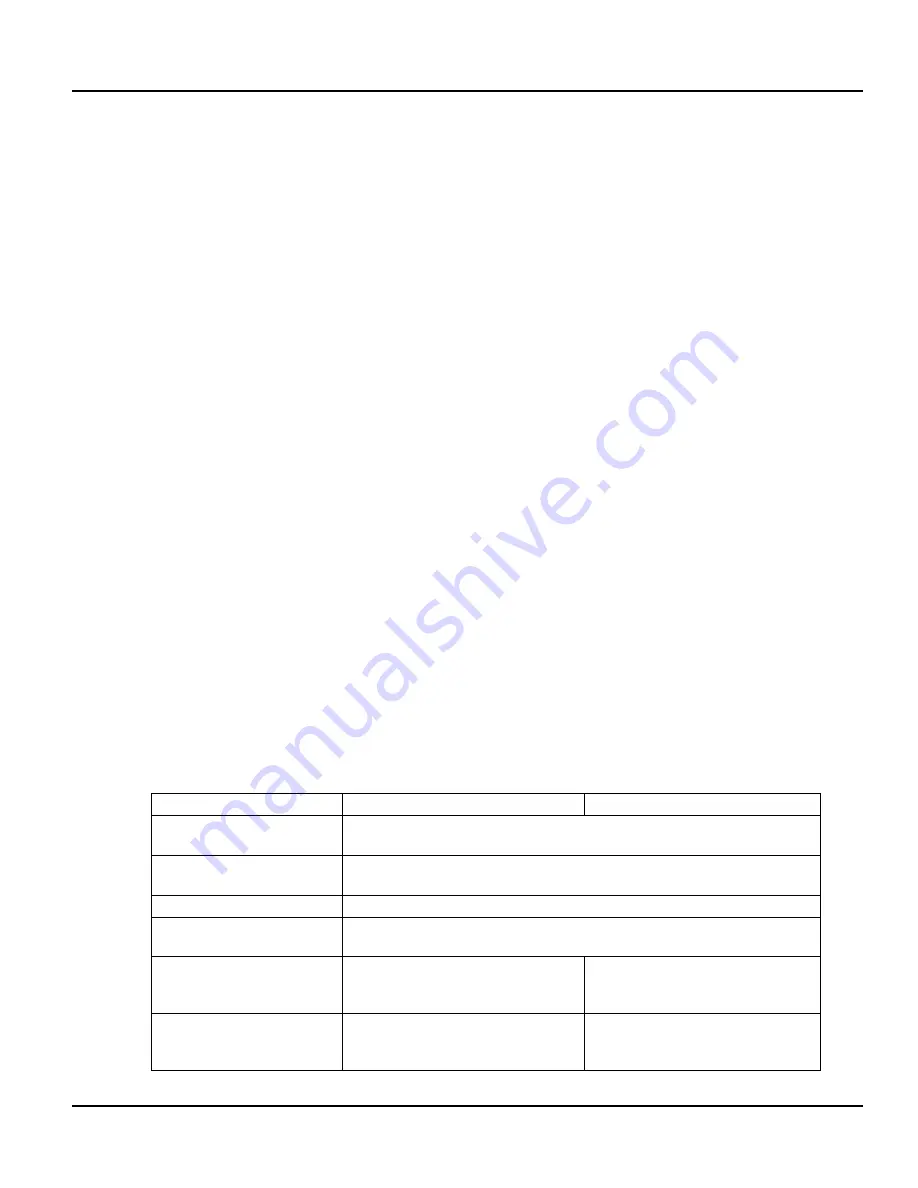
Commands
Some of the motion controller interface commands are described in detail below. The remaining
commands are only included for software debugging purposes.
Some of the commands are only meaningful for one of the controllers while others can be used
with both controllers.
Command
Rotate controller
Linear controller
RDB
,
WRB
,
RDW
,
WRW
,
RDL
,
WRL
Direct read/write of the processor memory/registers
Do not use
PRGAVR
Used to program the AVR microcontrollers. If this should ever be necessary,
you will receive detailed instructions
VERAVR
Verification of the AVR microcontroller flash memory
TIME
The system has a 1-second time tag you can read using this command. The
time restarts when the controller is booted
APOS
Rotate:
Reads out (x,y,z) position – x,y in
1/10 mm, z in 1/100 degree
Linear:
Not valid for linear controller
TVEL
Rotate:
Reads out actual (x,y,z) velocities –
x,y in 1/10 mm/s, z in 1/100 degree
Linear:
Not valid for linear controller
Summary of Contents for CARDIOMD
Page 1: ...CARDIOMD SERVICE MANUAL 1MAN0158 H11 04 2005 CSIP Level 1 ...
Page 10: ...Introduction x CardioMD Service Manual 1MAN0158 H11 04 2005 CSIP Level 1 ...
Page 16: ...Safe Operating Practices 1 6 CardioMD Service Manual 1MAN0158 H11 04 2005 CSIP Level 1 ...
Page 164: ...Detector Calibration Files 5 60 CardioMD Service Manual 1MAN0158 H11 04 2005 CSIP Level 1 ...
Page 328: ...Installation Procedures 9 38 CardioMD Service Manual 1MAN0158 H11 04 2005 CSIP Level 1 ...
Page 348: ...Planned Maintenance Procedures 11 6 CardioMD Service Manual 1MAN0158 H11 04 2005 CSIP Level 1 ...
Page 465: ......







































































