5 Installation
H-811 Hexapod Microrobot
MS235E
Version: 2.4.0
31
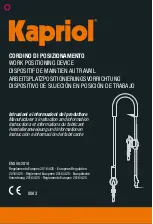
Fixing the load
1.
H-811.F2 model only: If necessary, remove the mounting plate from the motion
platform (see figure).
2.
Align the load so that the selected mounting holes can be used to fix it.
If you use locating pins to align the load:
a)
Drill two locating holes with Ø 3 mm F7 into the load to accommodate the locating
pins.
b)
Insert the locating pins into the locating holes in the motion platform or in the load.
c)
Place the load on the motion platform so that the locating pins are inserted into the
corresponding locating holes on the other side.
The layout for the holes in the motion platform of the hexapod and the mounting plate
can be found in the dimensional drawing (p. 72).
3.
To fix the load, tighten the screws in the selected mounting holes of the motion
platform or the mounting plate.
4.
H-811.F2 model only:
−
If necessary, put the mounting plate carefully onto the motion platform so that the
three balls on the bottom of the mounting plate are in the guidings on the top of
the motion platform (see figure).
5.7
Connecting the Hexapod to the Controller
Cables with a length of 0.5 m (H-811.I2., .F2, .S2) or 2 m (811.I2V) are installed permanently on
the hexapod.
Connecting cables are not included in the scope of delivery and must be ordered separately (p.
9).
Vacuum feedthroughs are also included in the scope of delivery of a vacuum-compatible
hexapod (p. 9).